Autonomous Robot
May 2017 - Aug 2017
Overview
A multi-award-winning autonomous robot developed for GVSU’s Robot Sockey competition. The system achieved 1st place at GVSU and went on to win 1st Place at the IEEE International Student Robotics Competition (Portland, OR).
-
Team Captain:
Coordinated schedules and team meetings
Tracked project budget
Verified robot compliance with competition regulations
Mechanical:
Led overall robot design and layout
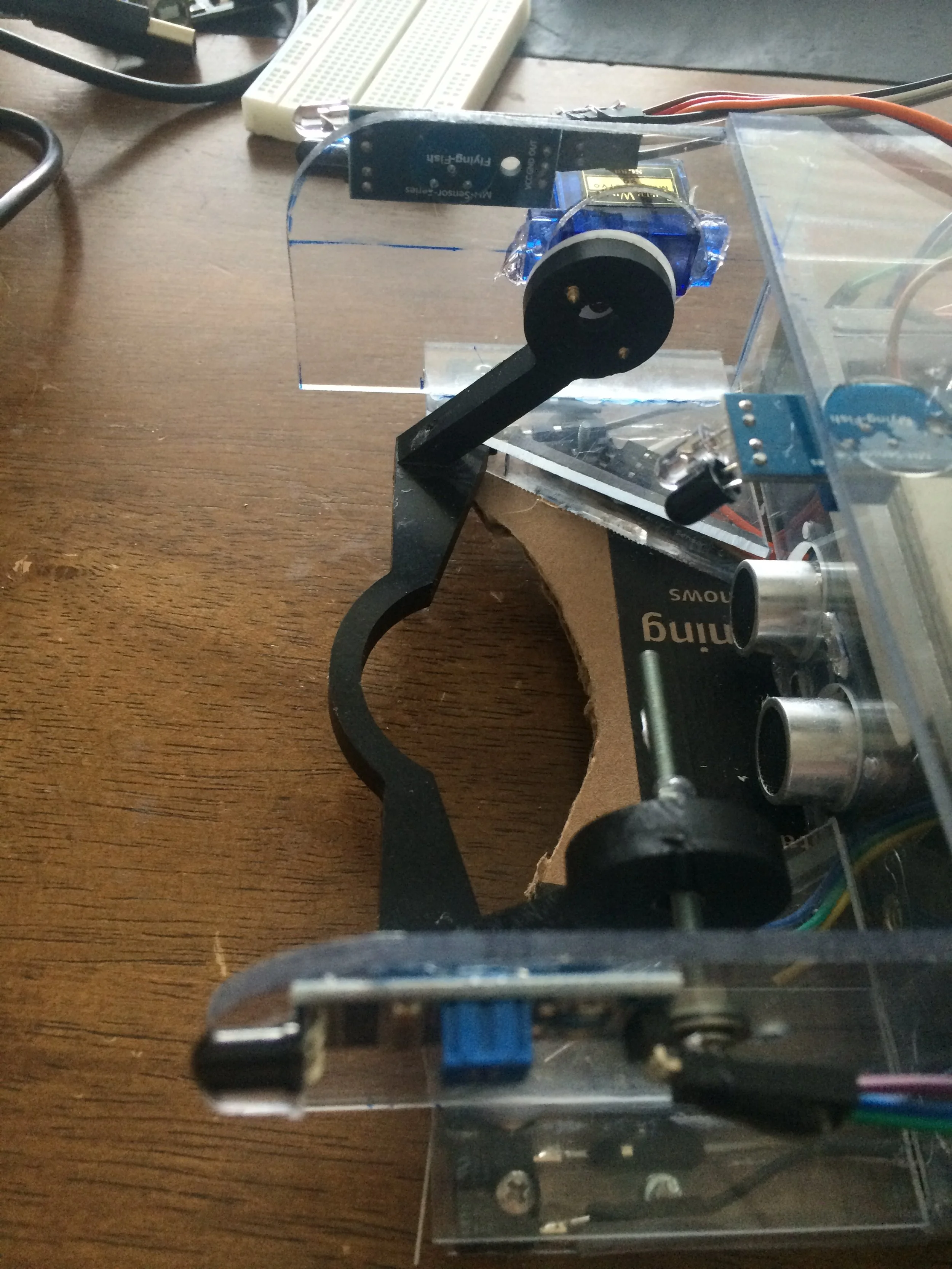
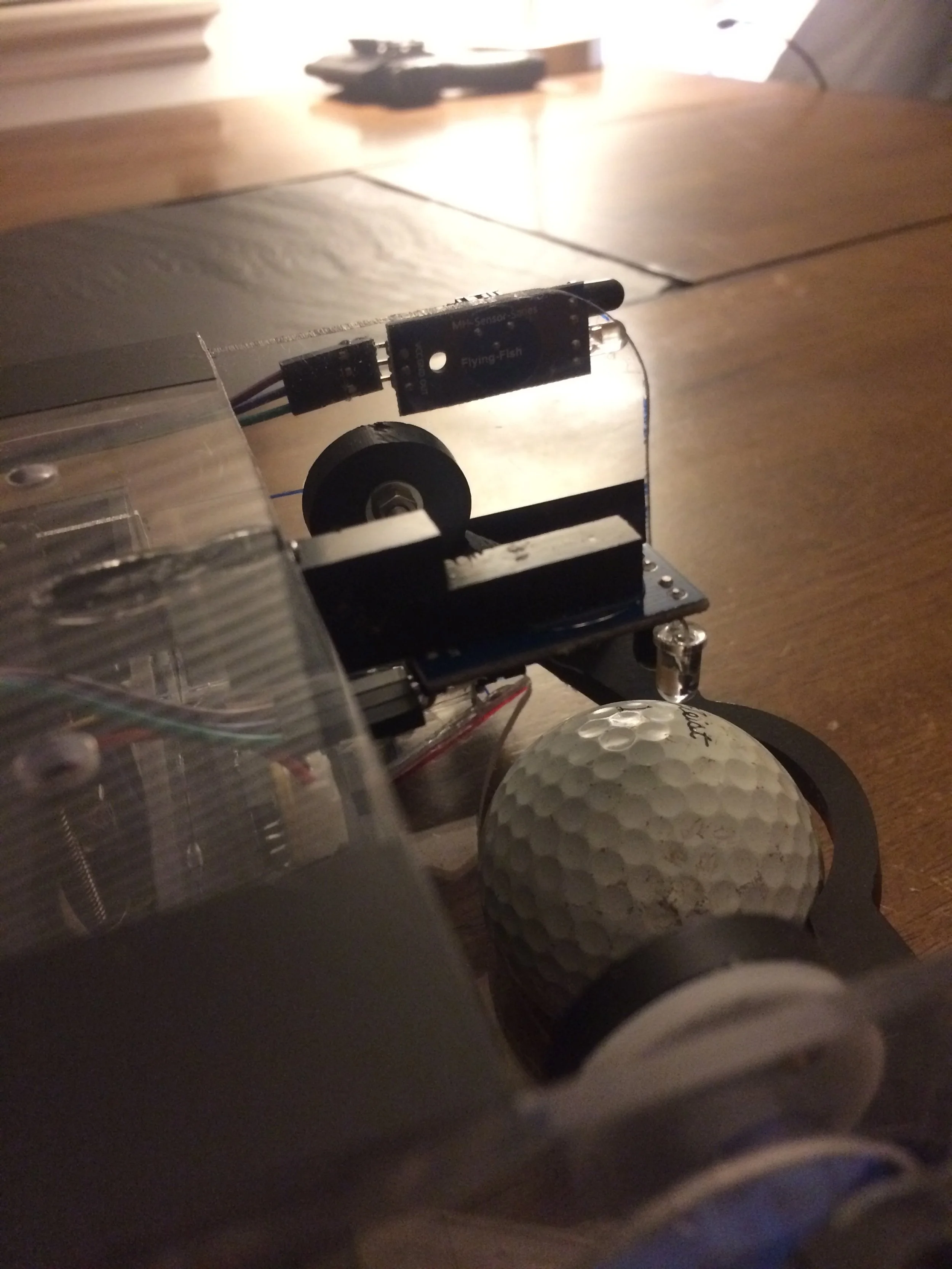
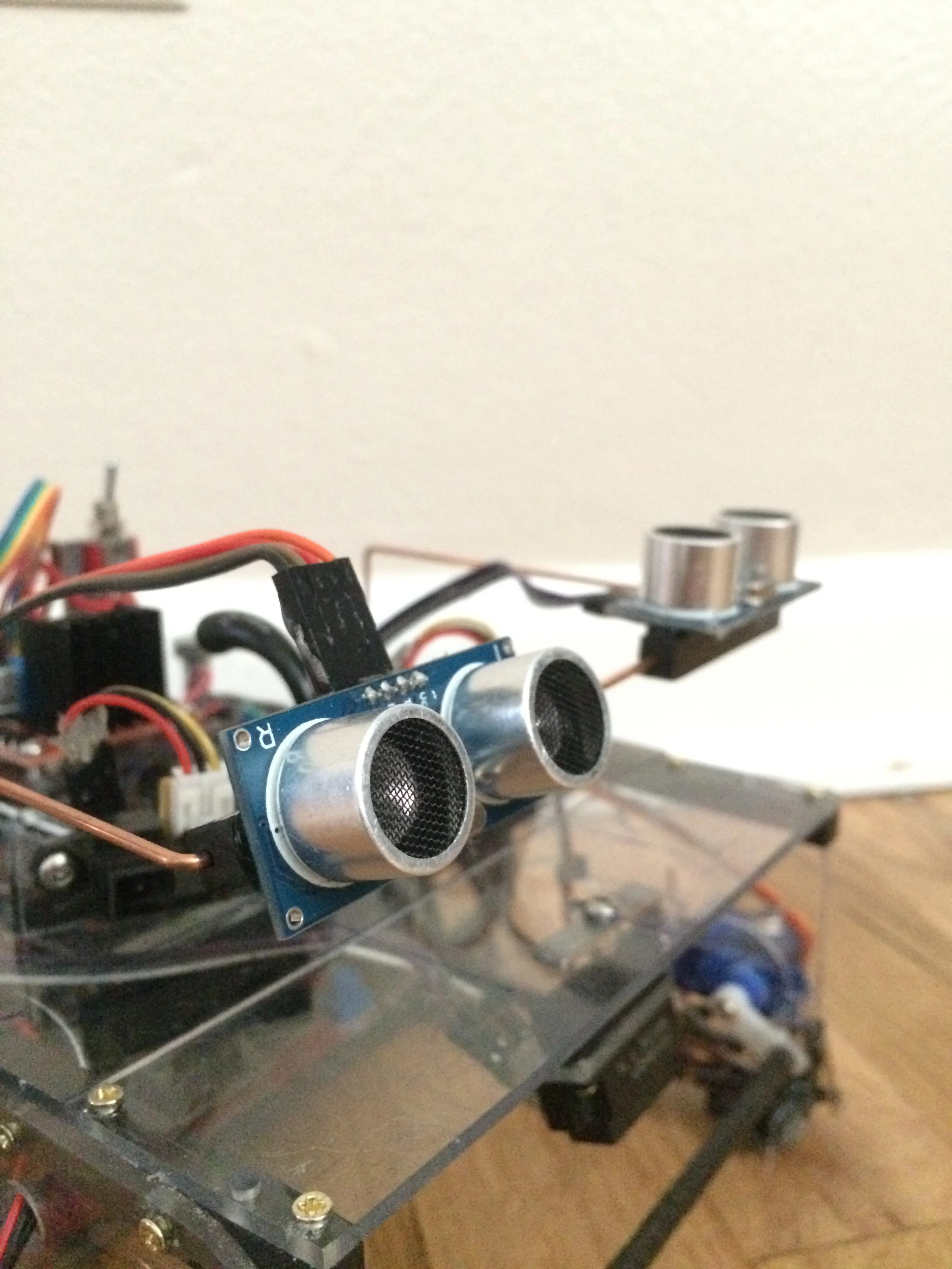
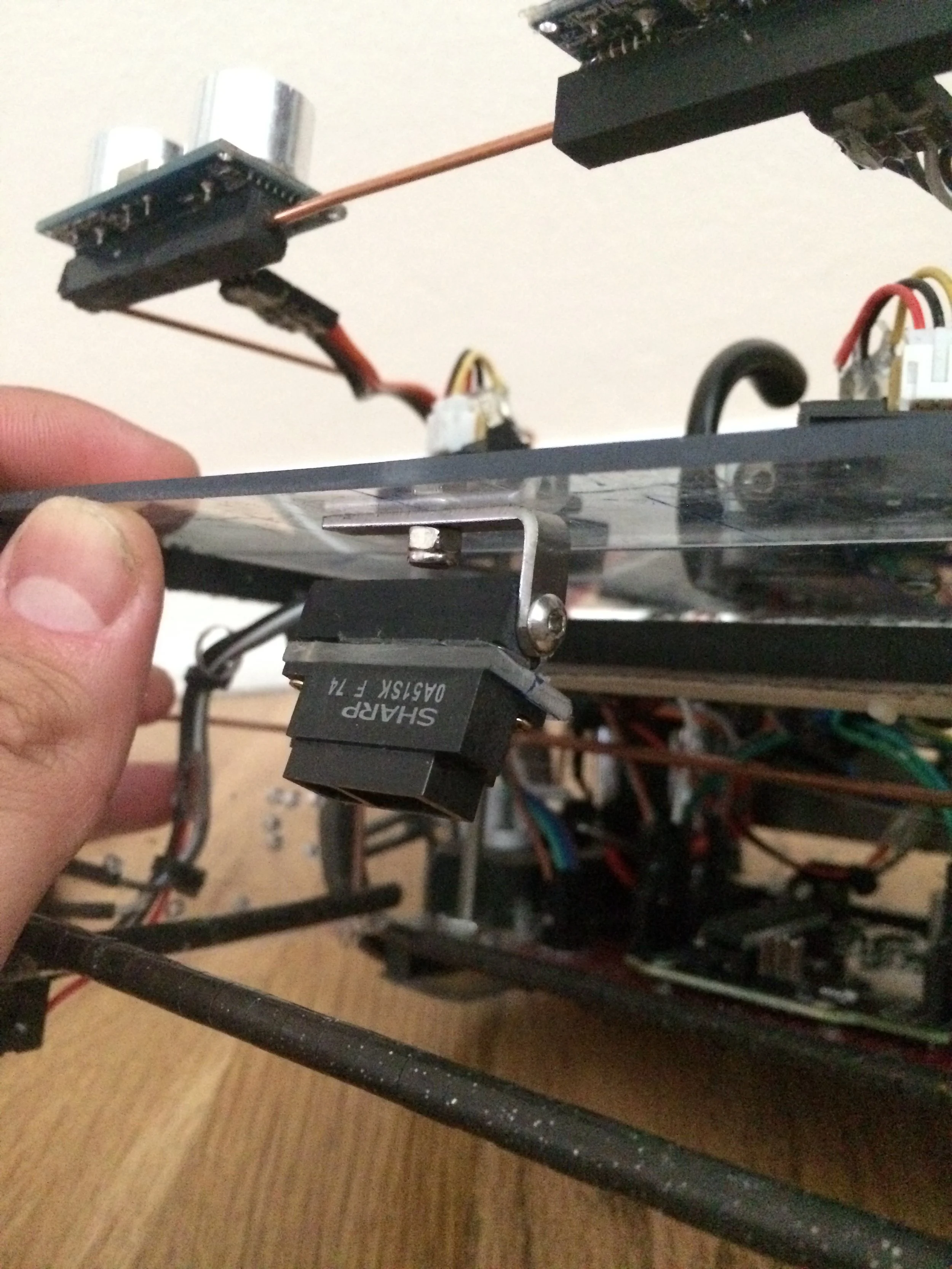
Defined sensor placement and mounting strategy
Determined motor and servo placement
Fabricated and assembled the complete robot
Software (System Integration):
Collaborated on state machine design for autonomous behavior
Defined sensor-to-software interface requirements
Supported integration of sensor inputs into control logic
Electrical:
Routed sensor and motor wiring
Defined Arduino pin allocation and wiring architecture
Integrated power distribution (battery, H-bridge, and motor control)
-
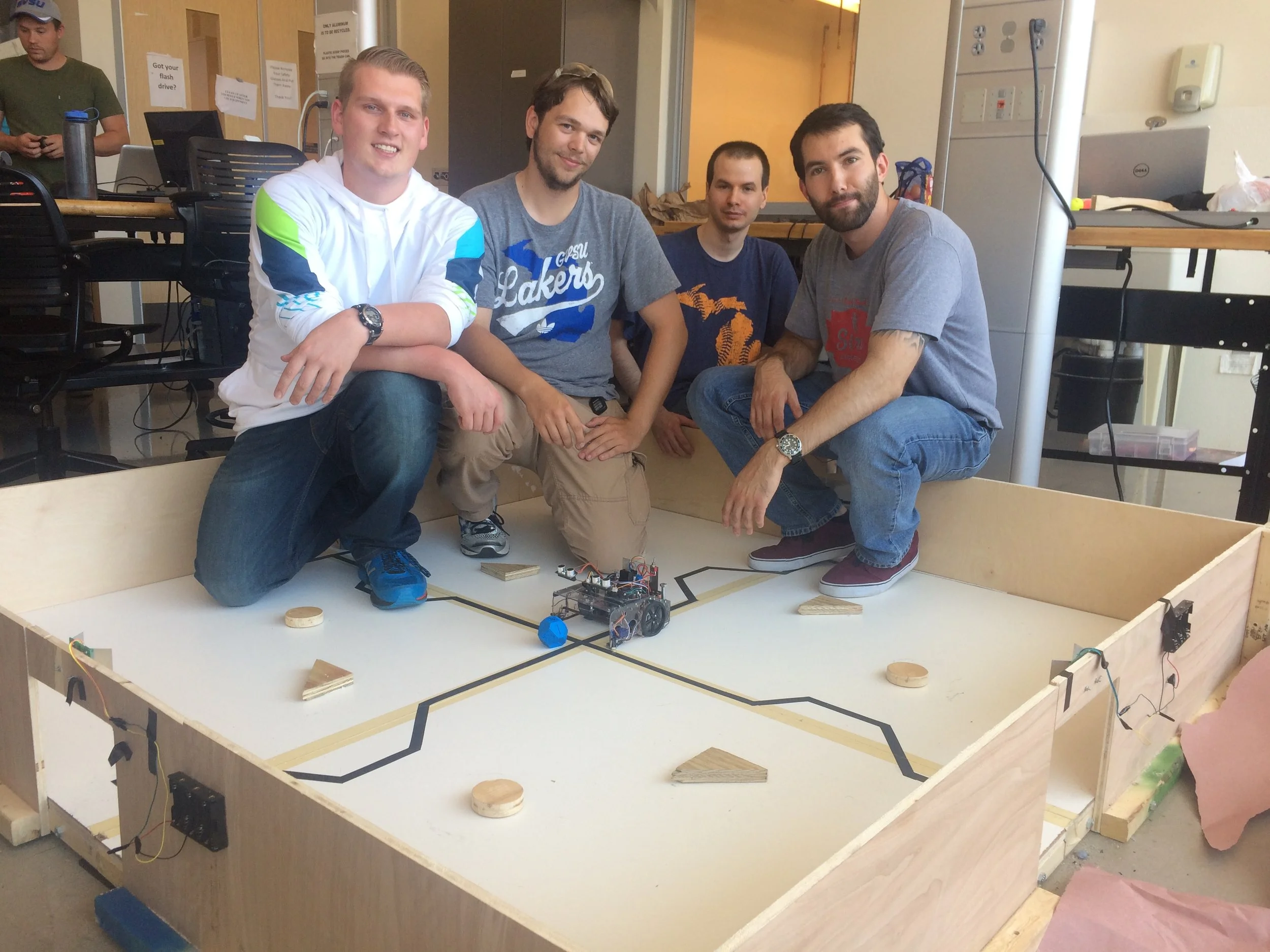
The goal of this project was to design and build an autonomous robot capable of competing in a multi-robot “robot sockey” game.
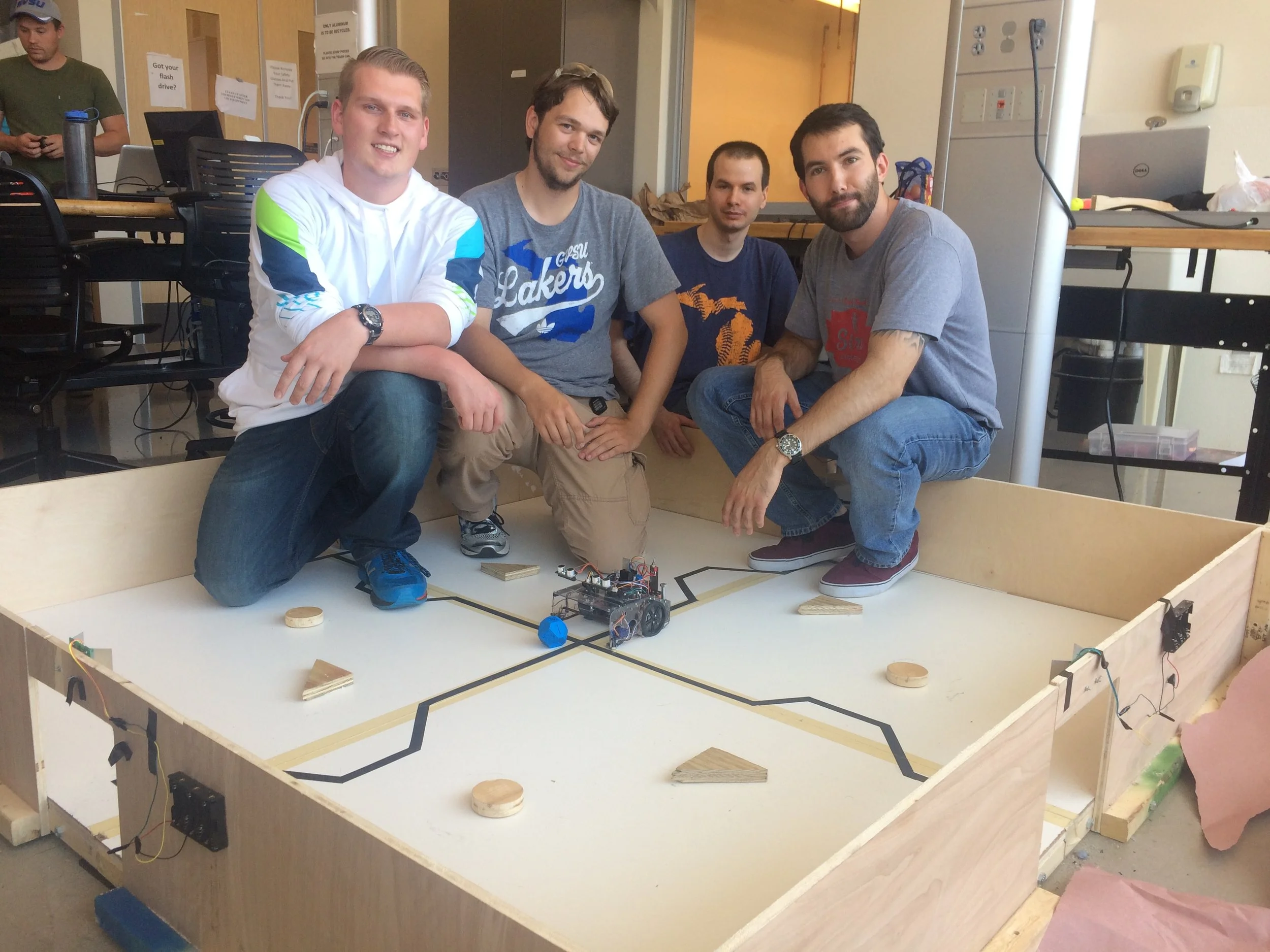
Matches take place in a 6’ × 6’ arena with approximately 1-foot-tall walls. Each wall contains a 1-foot-wide goal at its center. The arena includes eight fixed wooden obstacles to increase navigation difficulty, as well as black lines on the floor that define paths to each goal. Infrared beacons positioned above each goal are used for detection by onboard sensors.
At the start of each match, 24 balls of varying types (including ping-pong balls, golf balls, and rubber balls) are distributed throughout the arena. Four robots compete simultaneously, with the objective of scoring the most goals within a three-minute time limit. A goal is awarded to the last robot that contacts the ball before it enters a goal. Robots that exit the arena are removed from play.
-
Challenges:
Initial design limitations were identified only after early testing, requiring a complete mid-development redesign
Balancing sensor selection with reliable autonomous behavior under time constraints
Outcomes:
Implemented a redesigned system that improved performance through better alignment of sensors and control logic
Achieved first place in the class and went on to win the IEEE robotics competition
Explore This Project
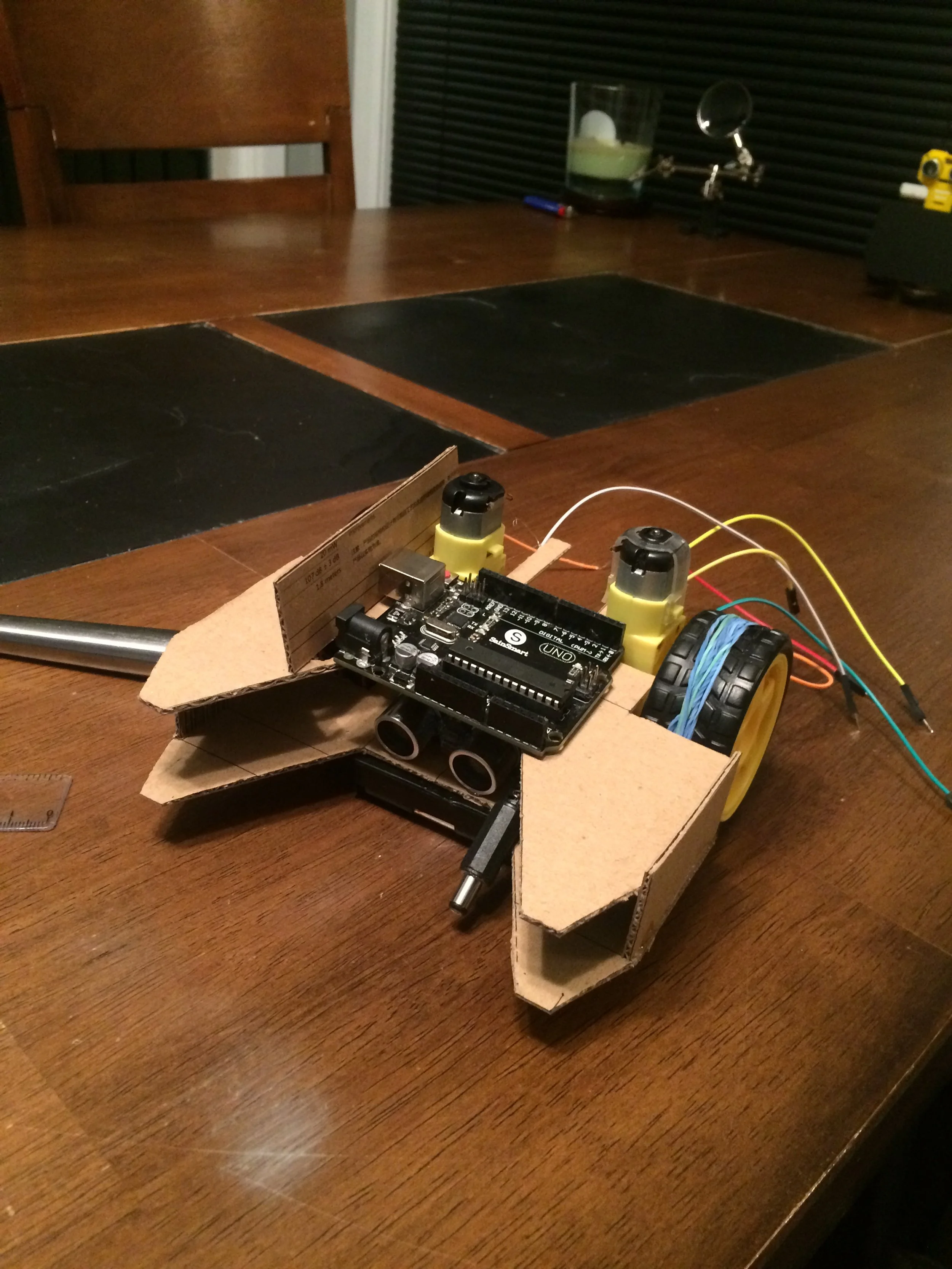
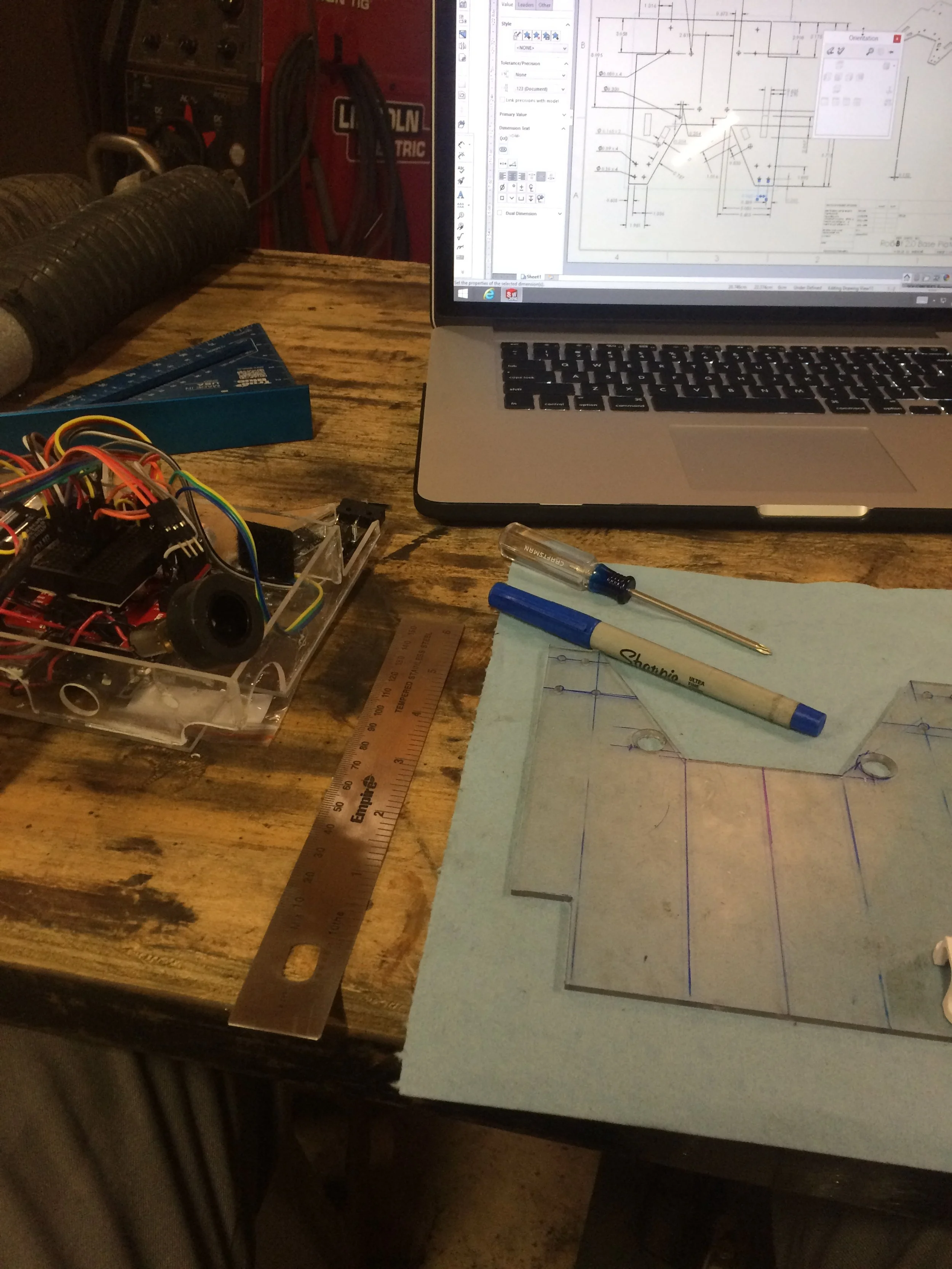
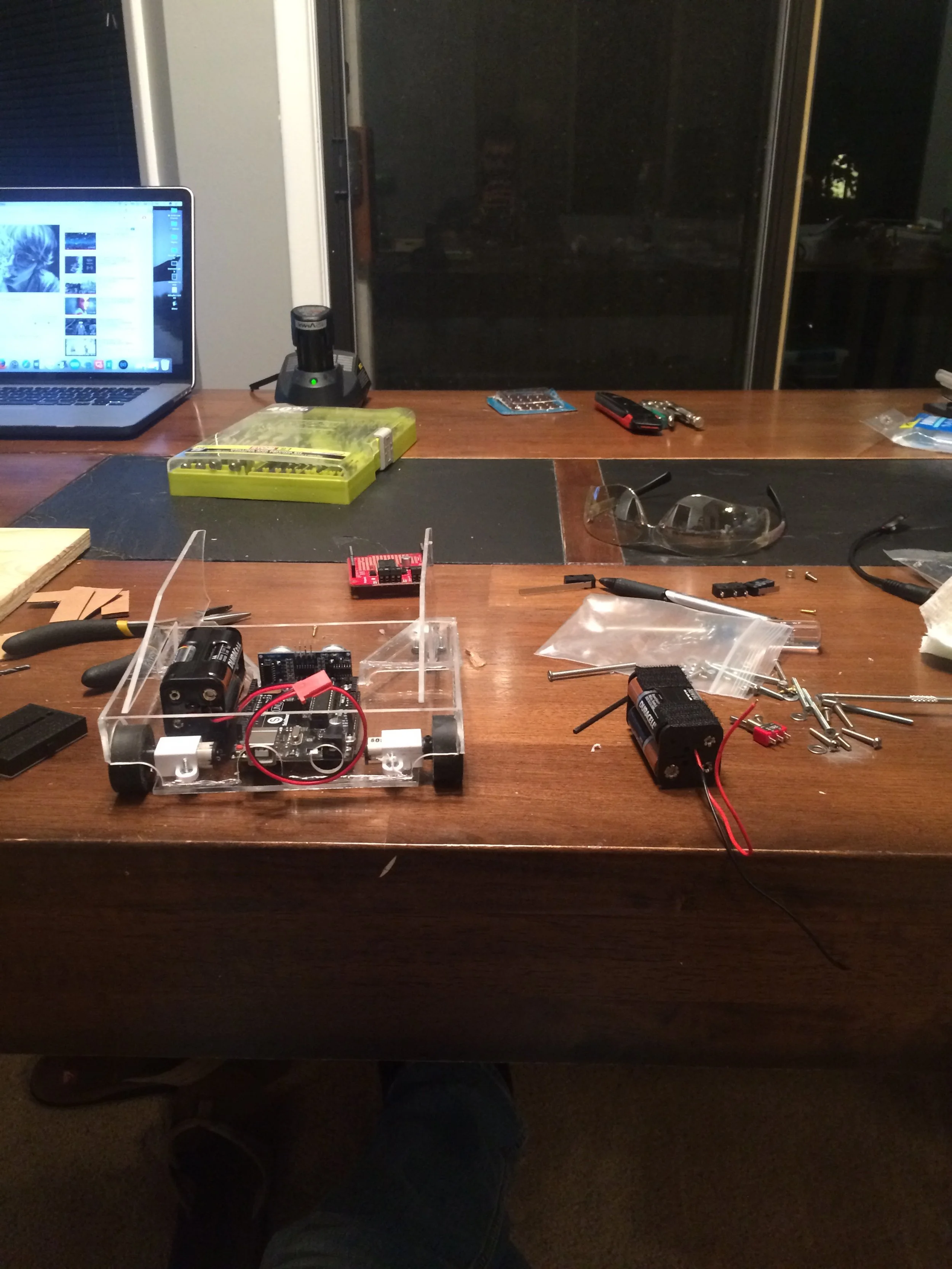
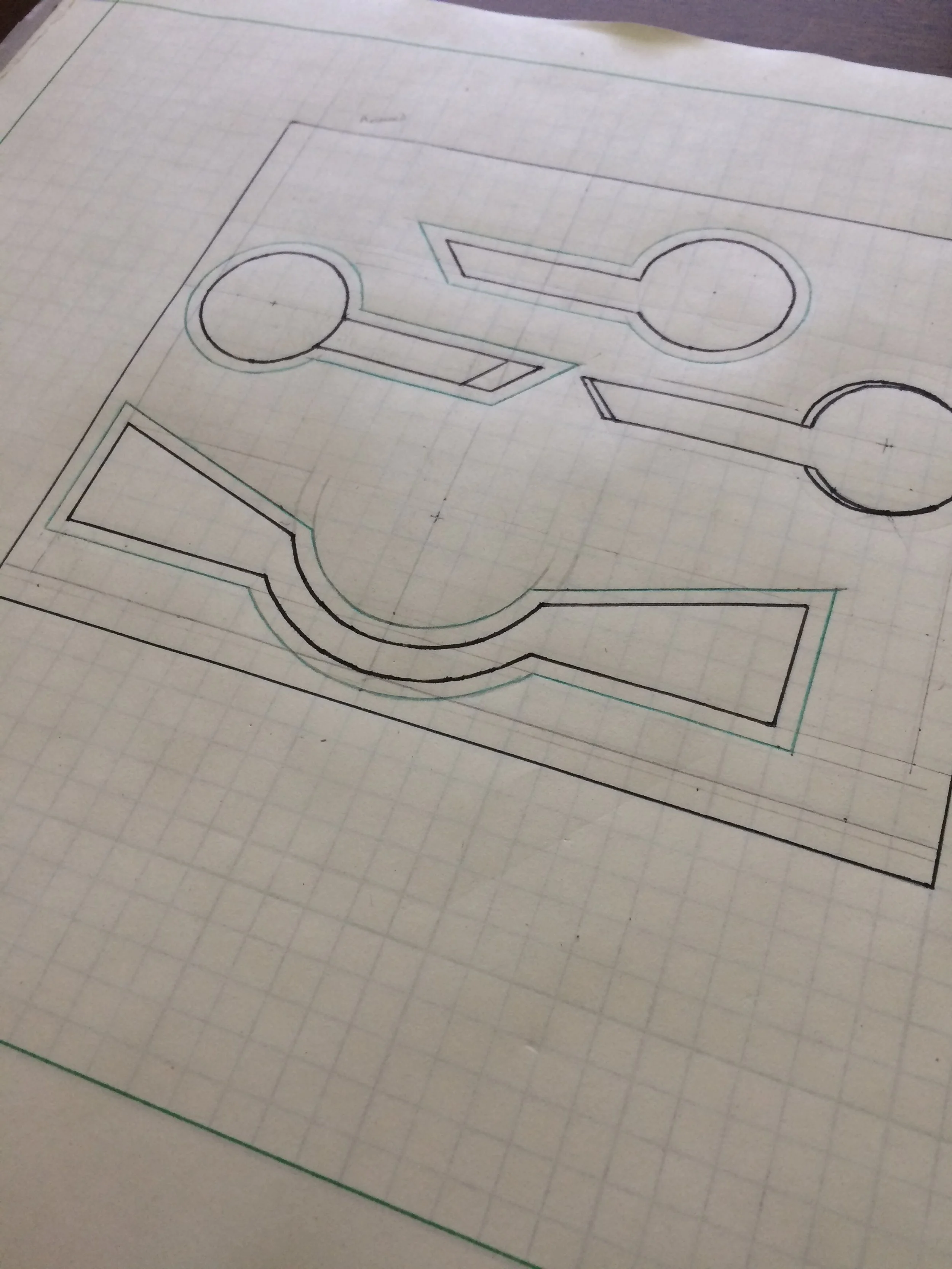
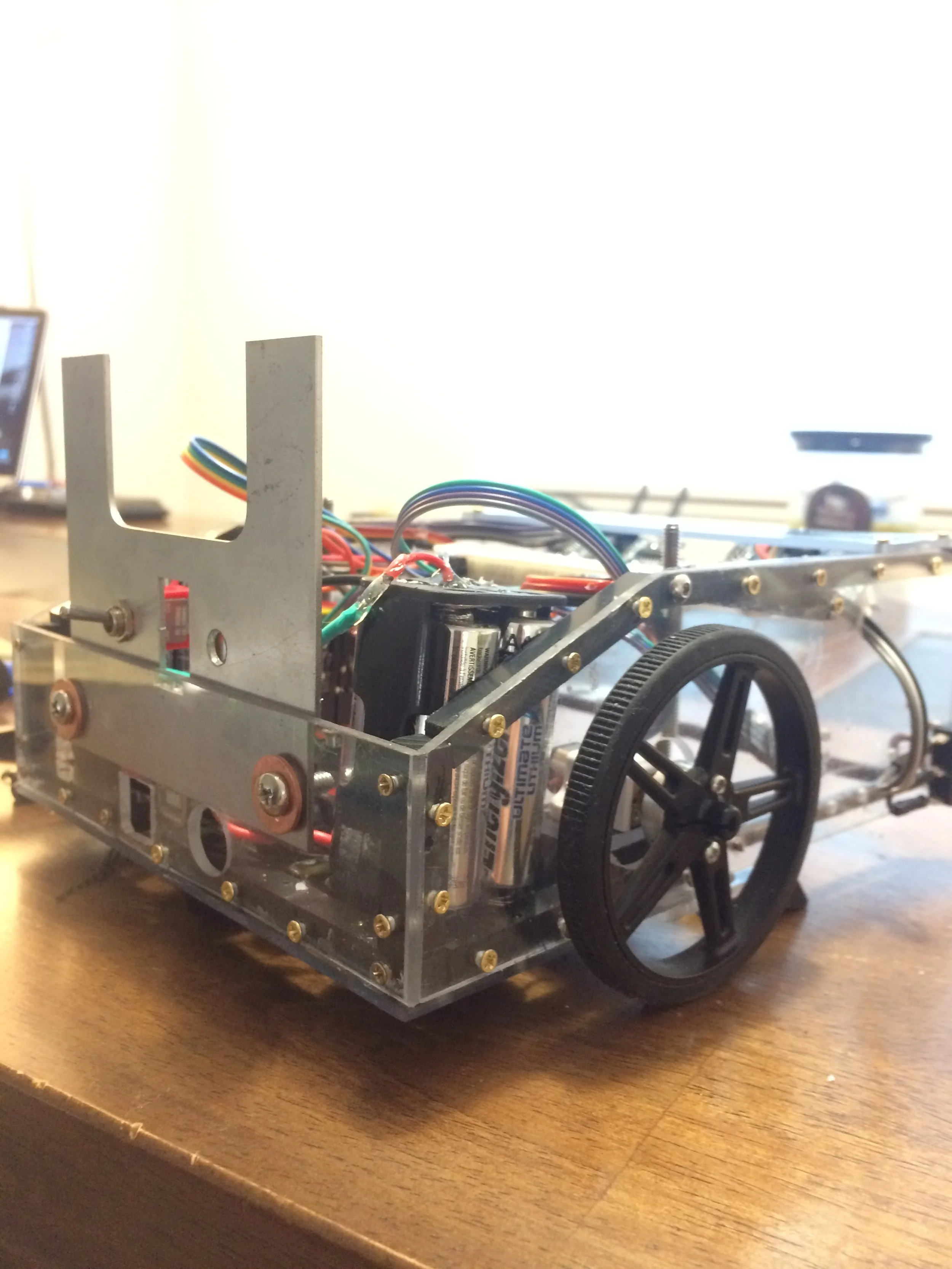
Prototyping
Initial prototypes were developed to validate mechanical layout, sensor placement, and ball collection strategy. Early testing during the preliminary competition revealed key limitations in chassis capacity and sensor integration.
While the control logic performed as expected, the physical design constrained performance. This led to a full redesign focused on increasing ball collection efficiency and improving sensor coverage for line following.




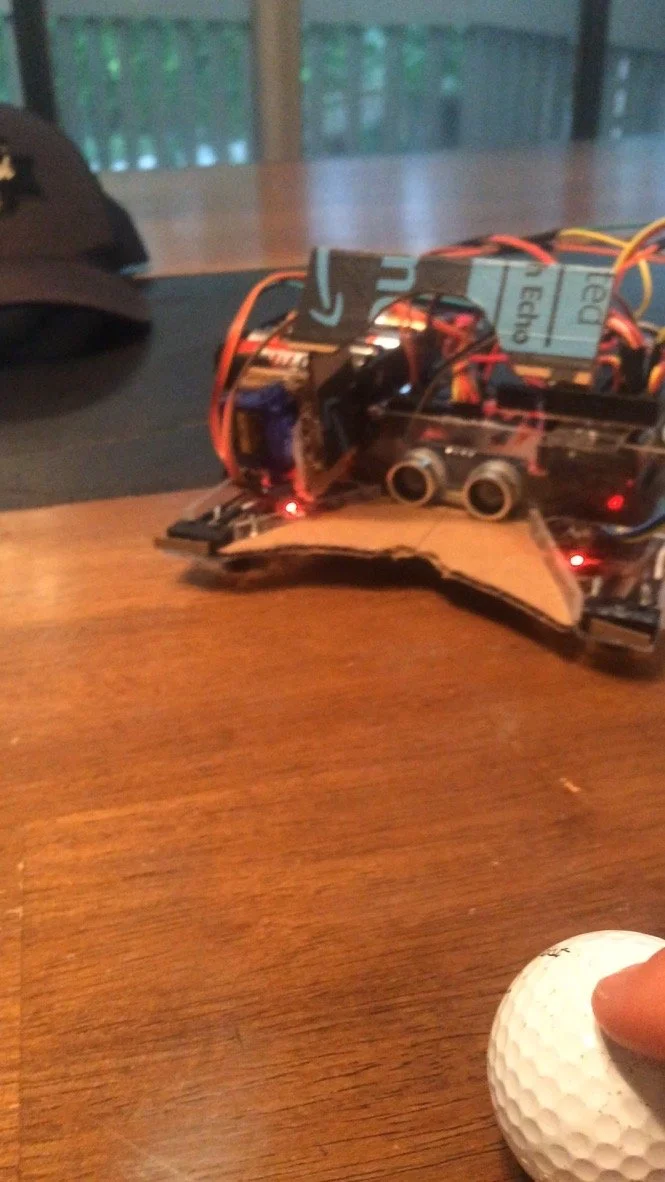


Software Design
The robot’s behavior was governed by a state-based control system driven by real-time sensor feedback. The system cycled through key operational states including ball search, acquisition, line following, and scoring.
Sensor inputs were used to dynamically adjust behavior, enabling obstacle avoidance, line detection, and goal alignment. The robot executed this sequence multiple times per match, prioritizing reliability and repeatability under competition conditions.


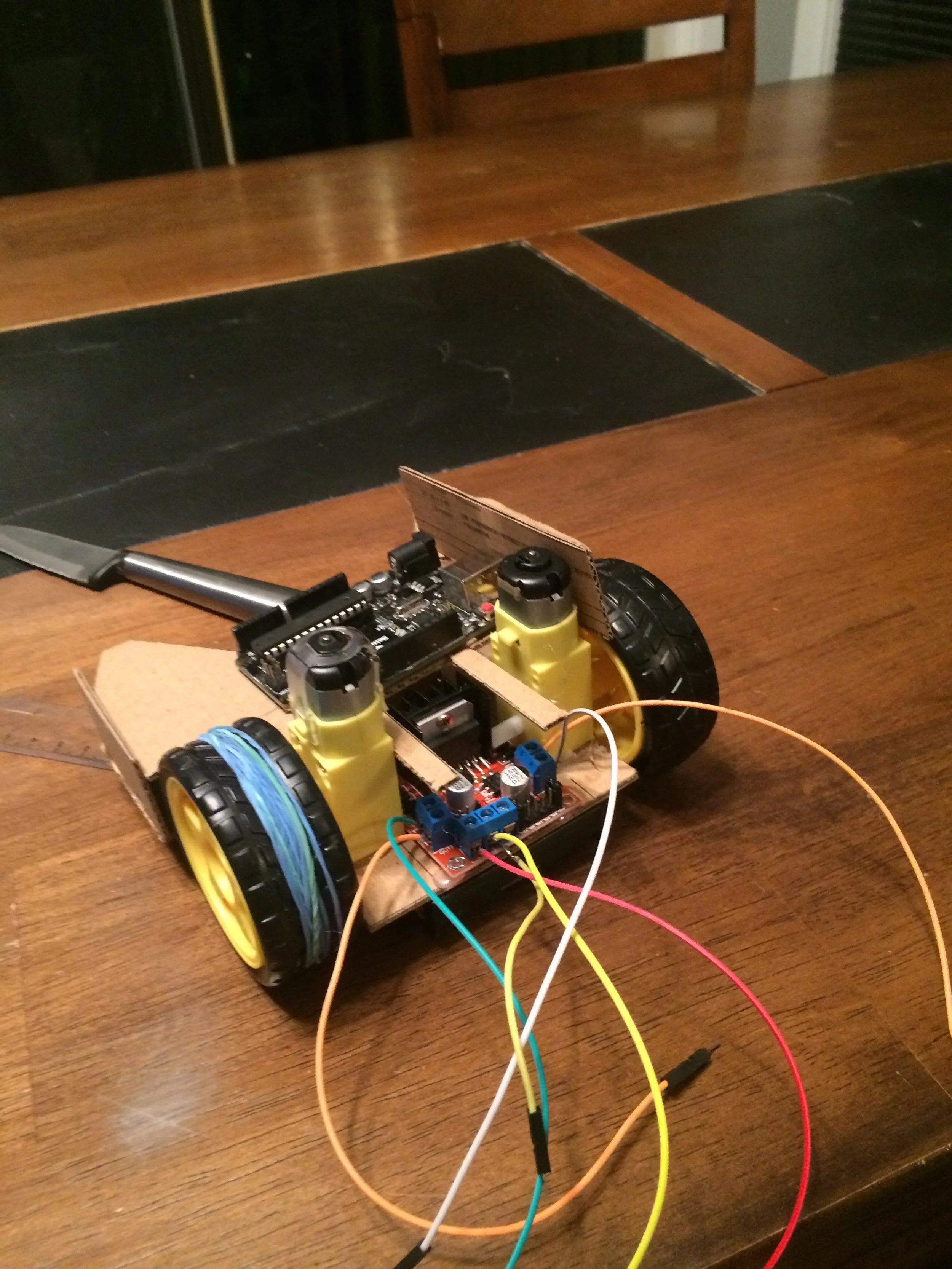
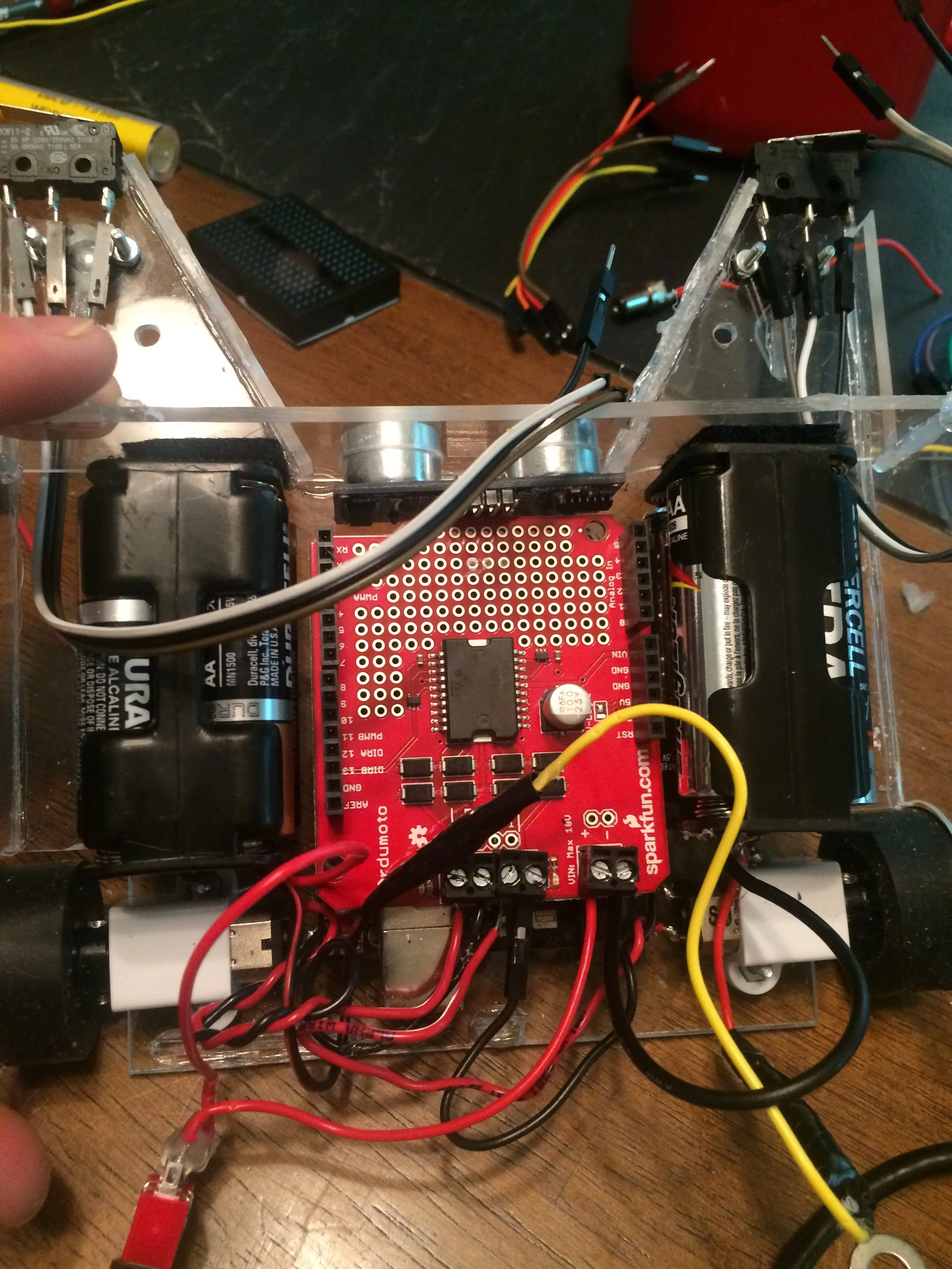
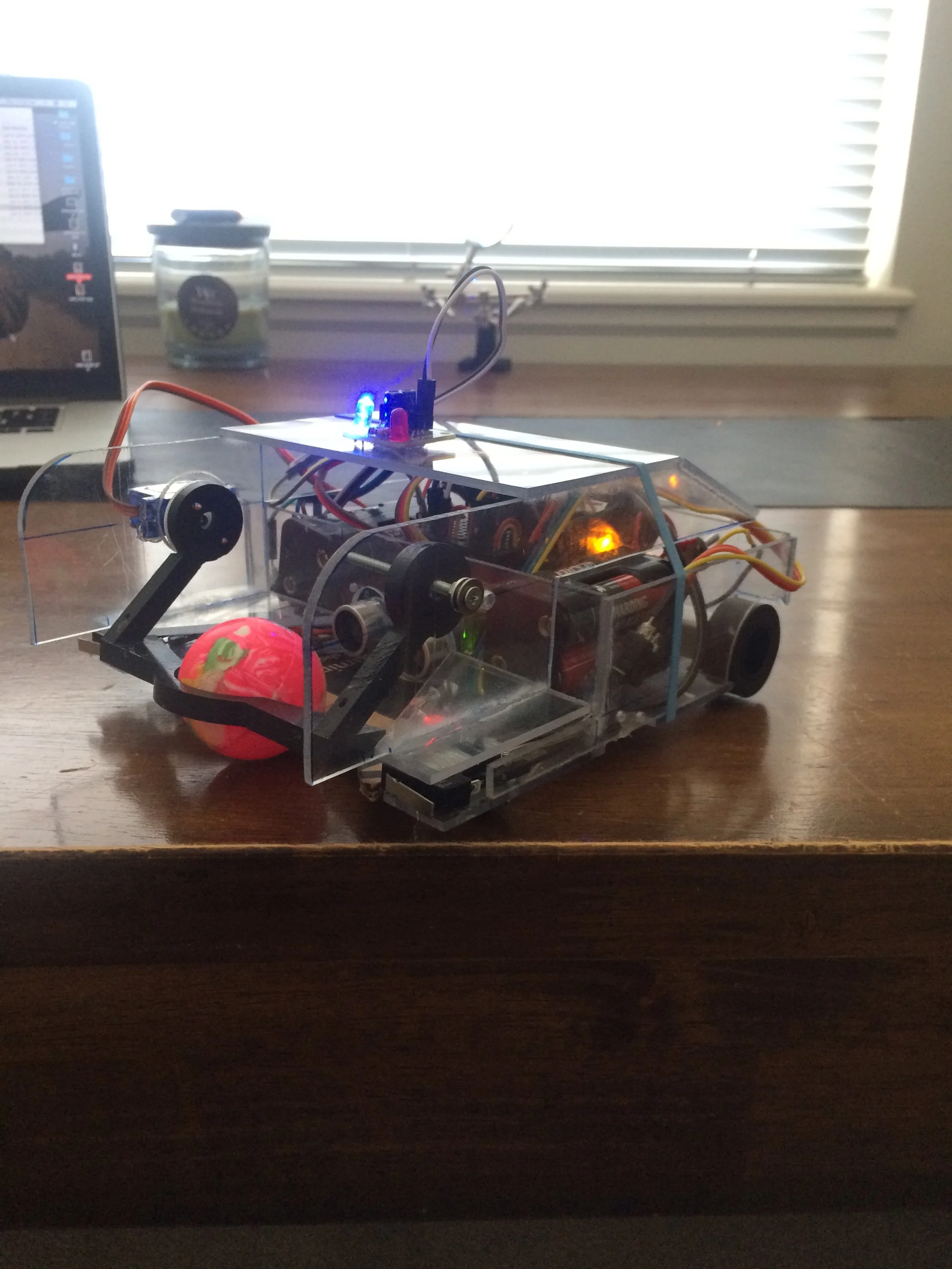
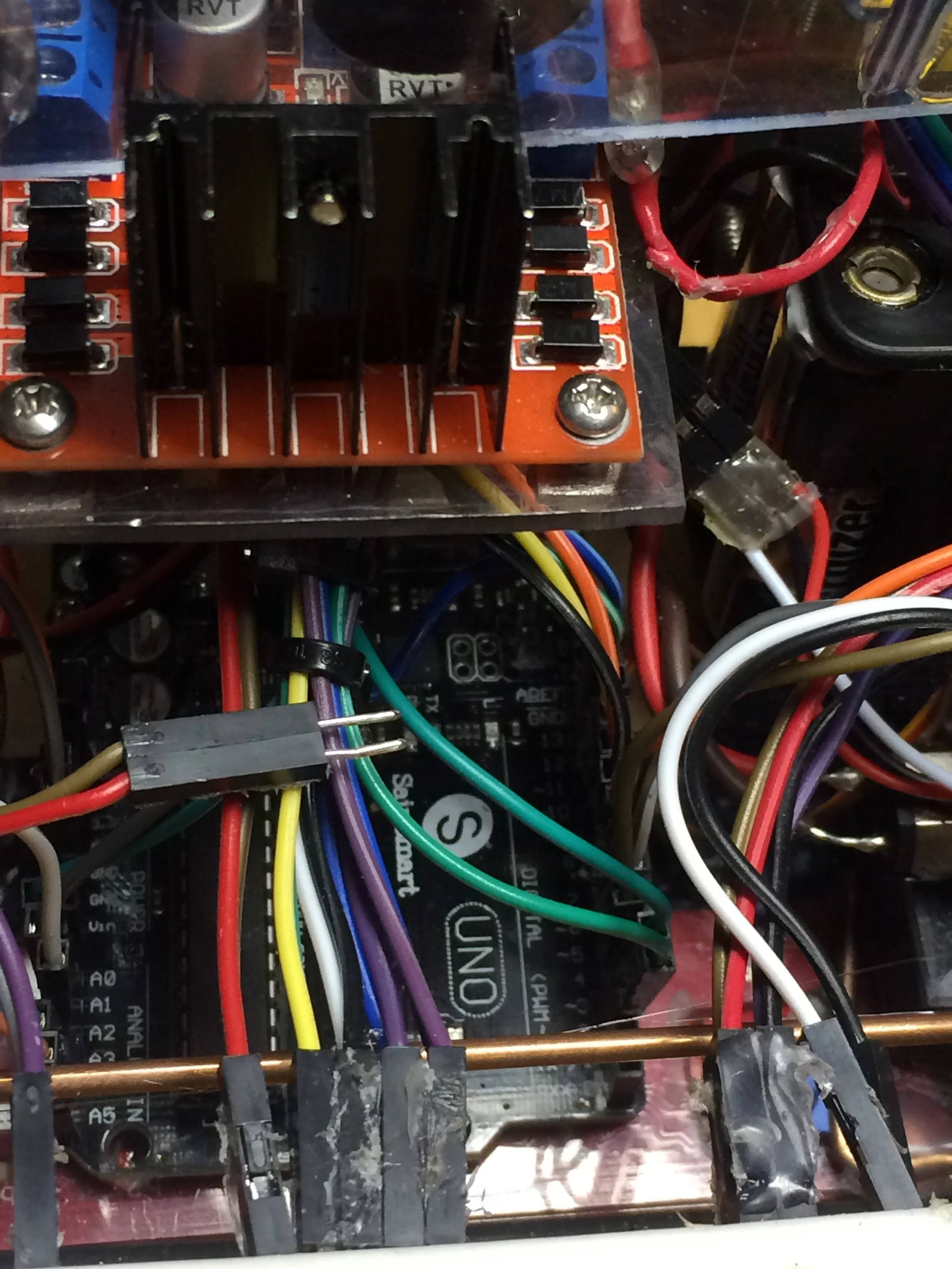
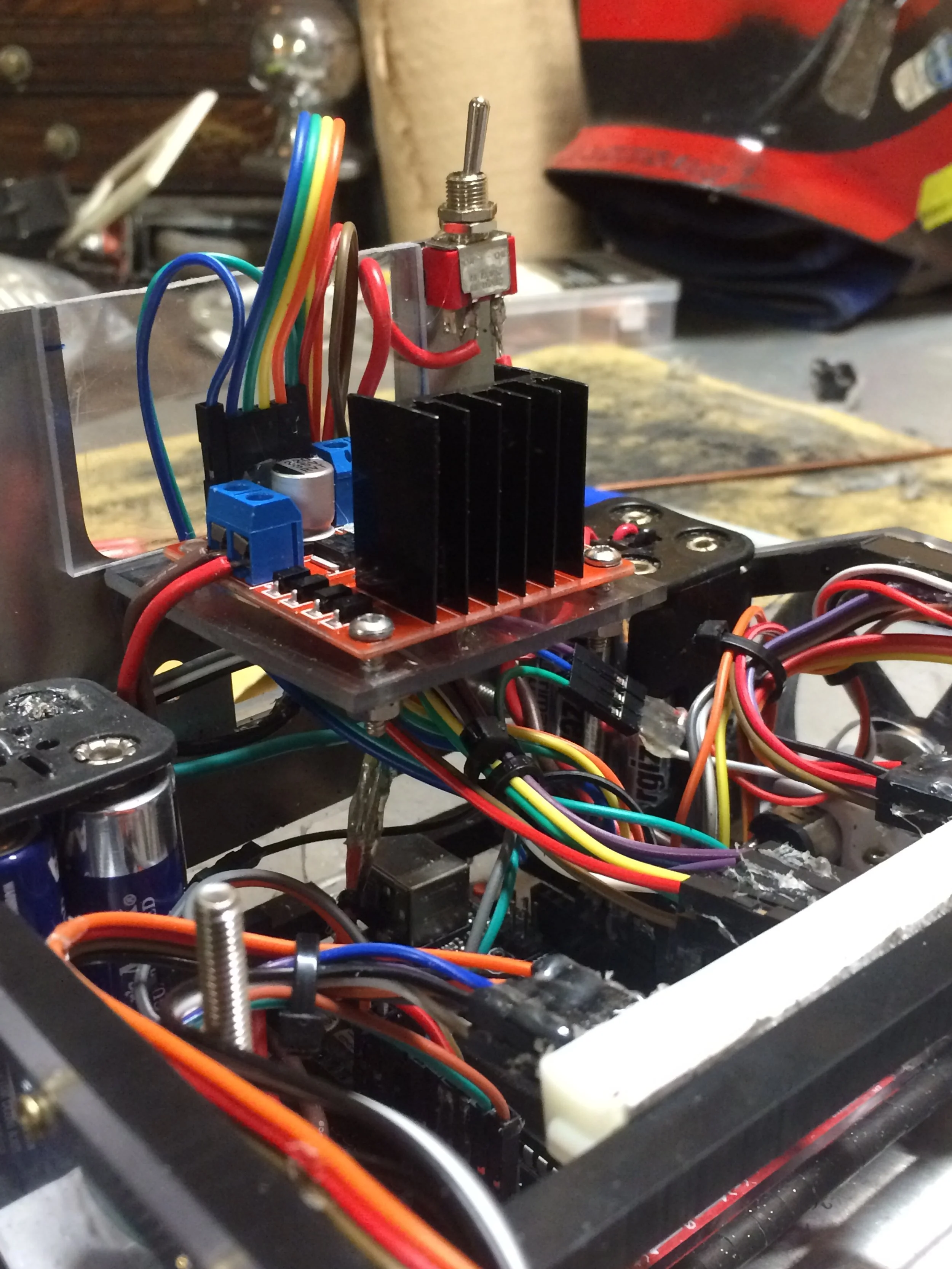
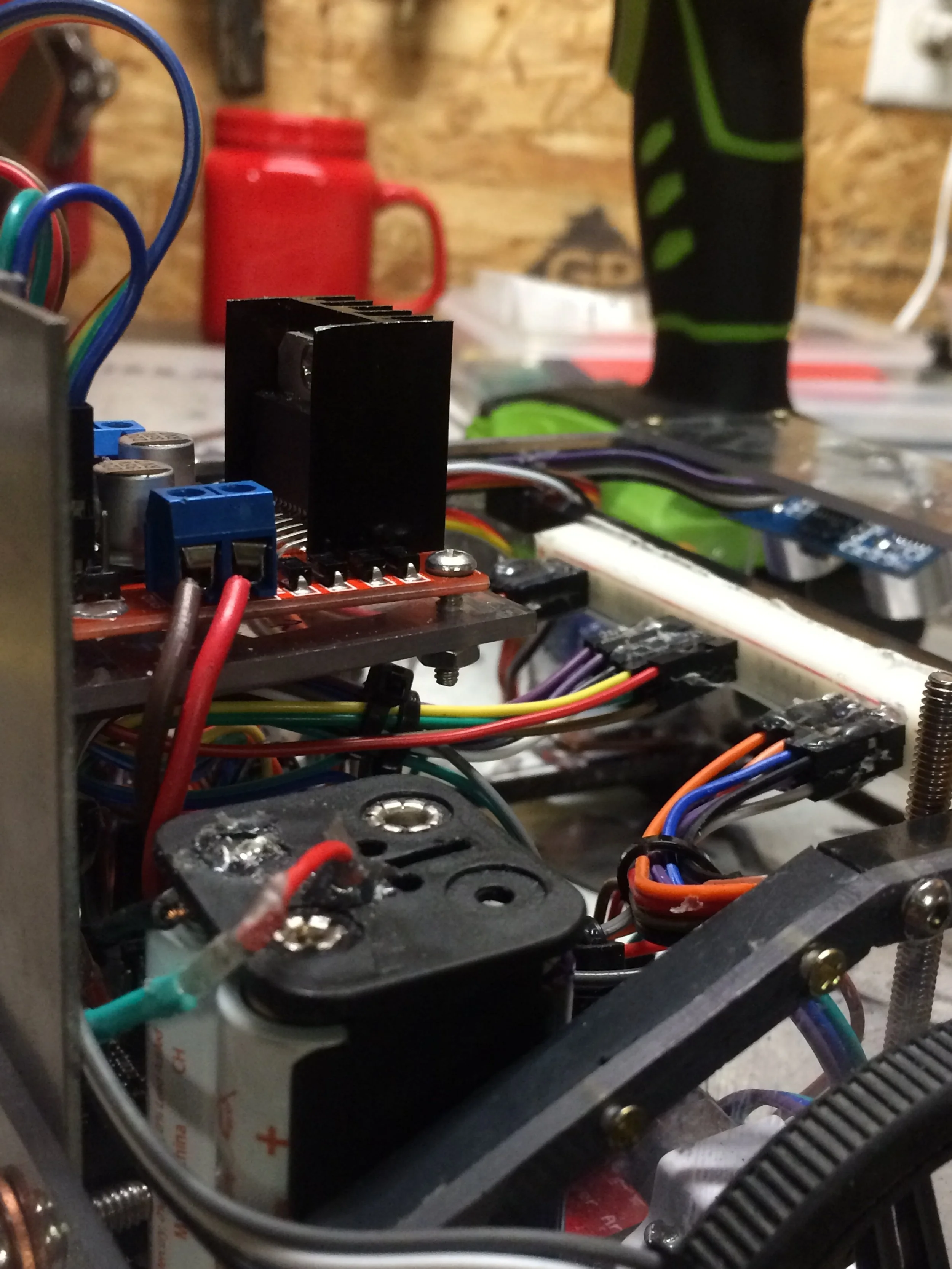
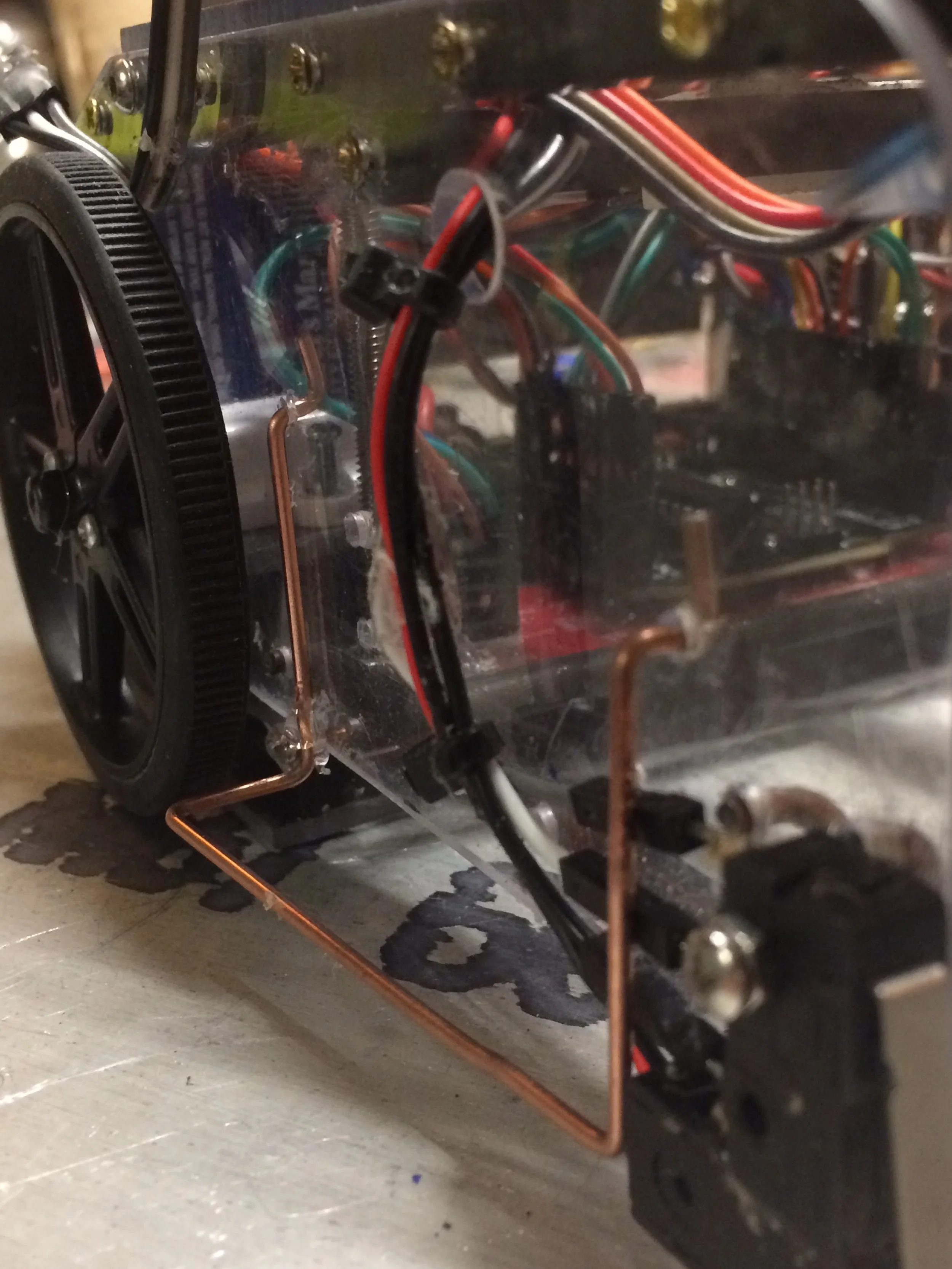
Electrical Design
The electrical system was designed around the limited I/O capacity of the Arduino Uno, requiring careful prioritization of sensors and actuators. Nearly all available pins were utilized to support motor control, sensor inputs, and system feedback.
An H-bridge was implemented to drive the DC motors, while an independent battery supply powered both the control system and drive components. Wiring layout and component placement were designed to minimize interference and maintain reliability during operation.
Given the competitive environment, additional consideration was given to protecting sensors and wiring from impacts with obstacles and other robots.


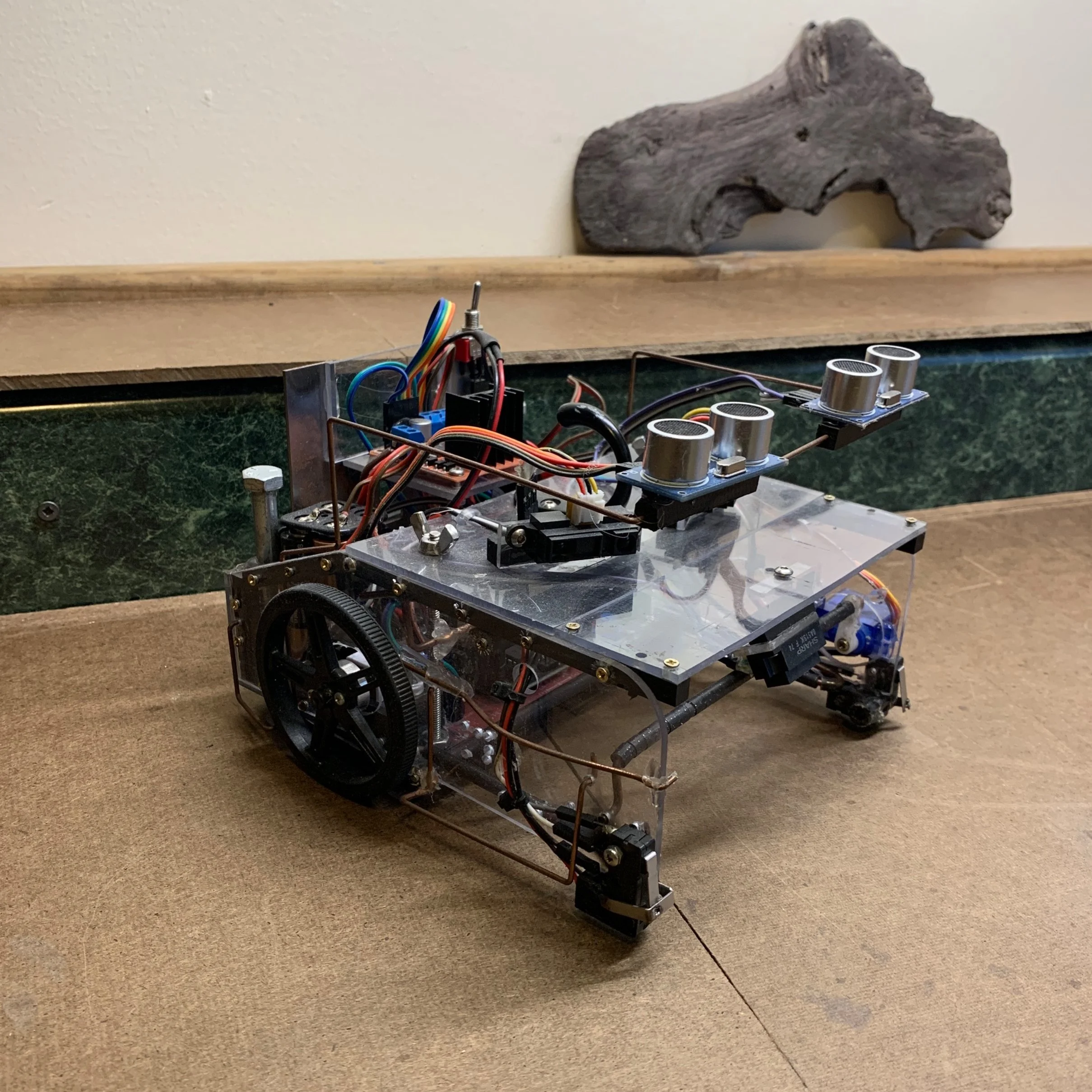
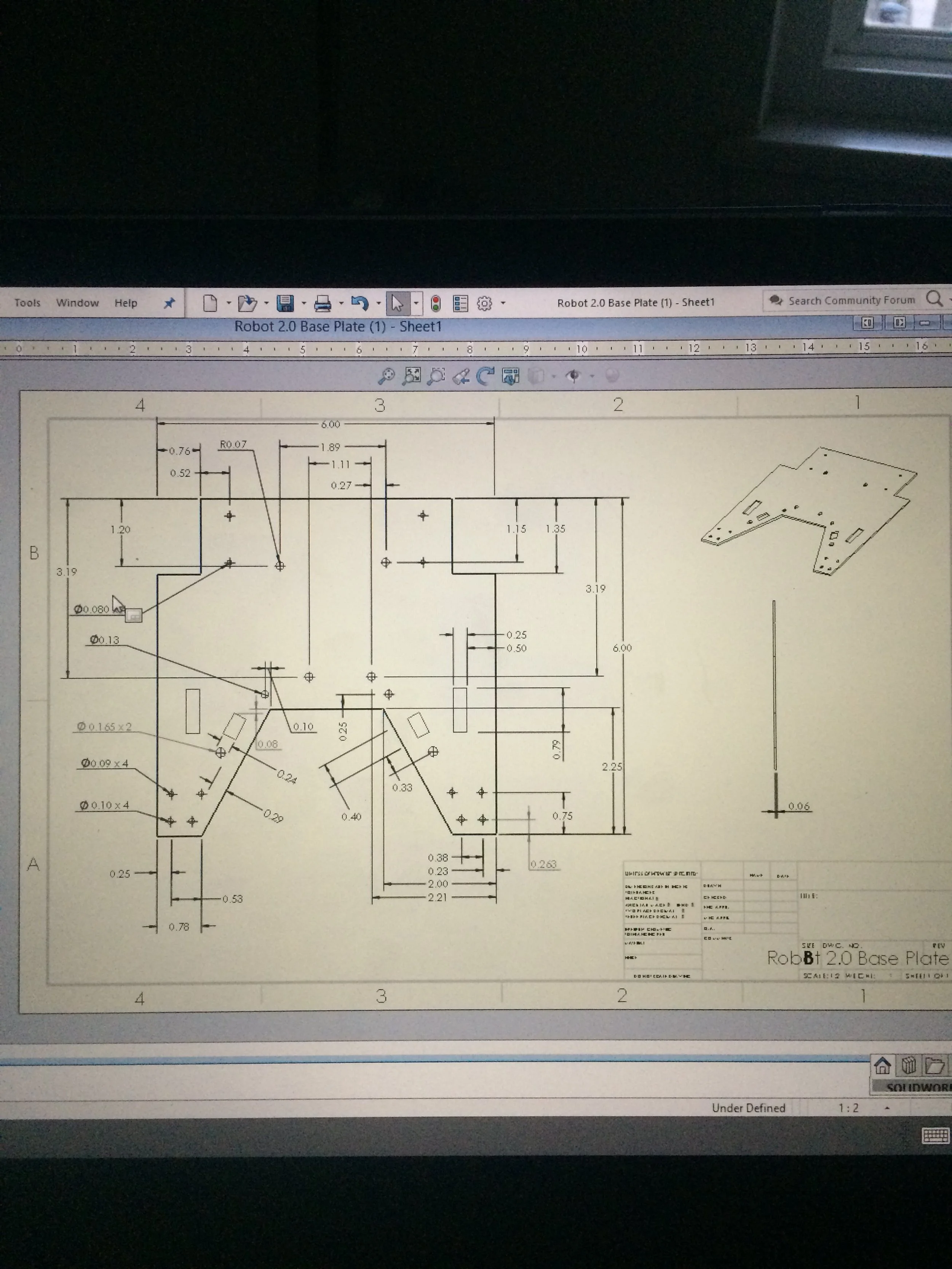
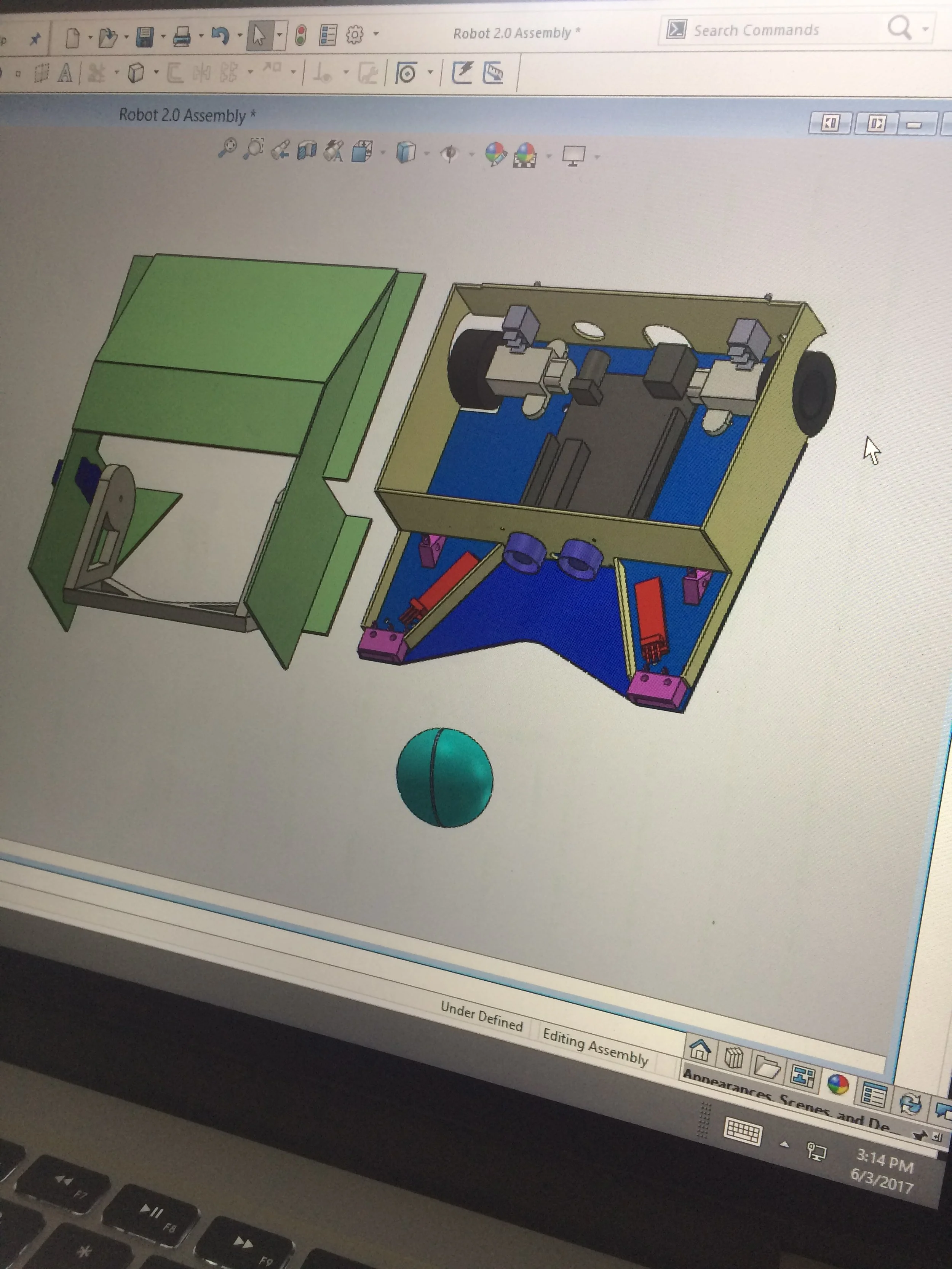
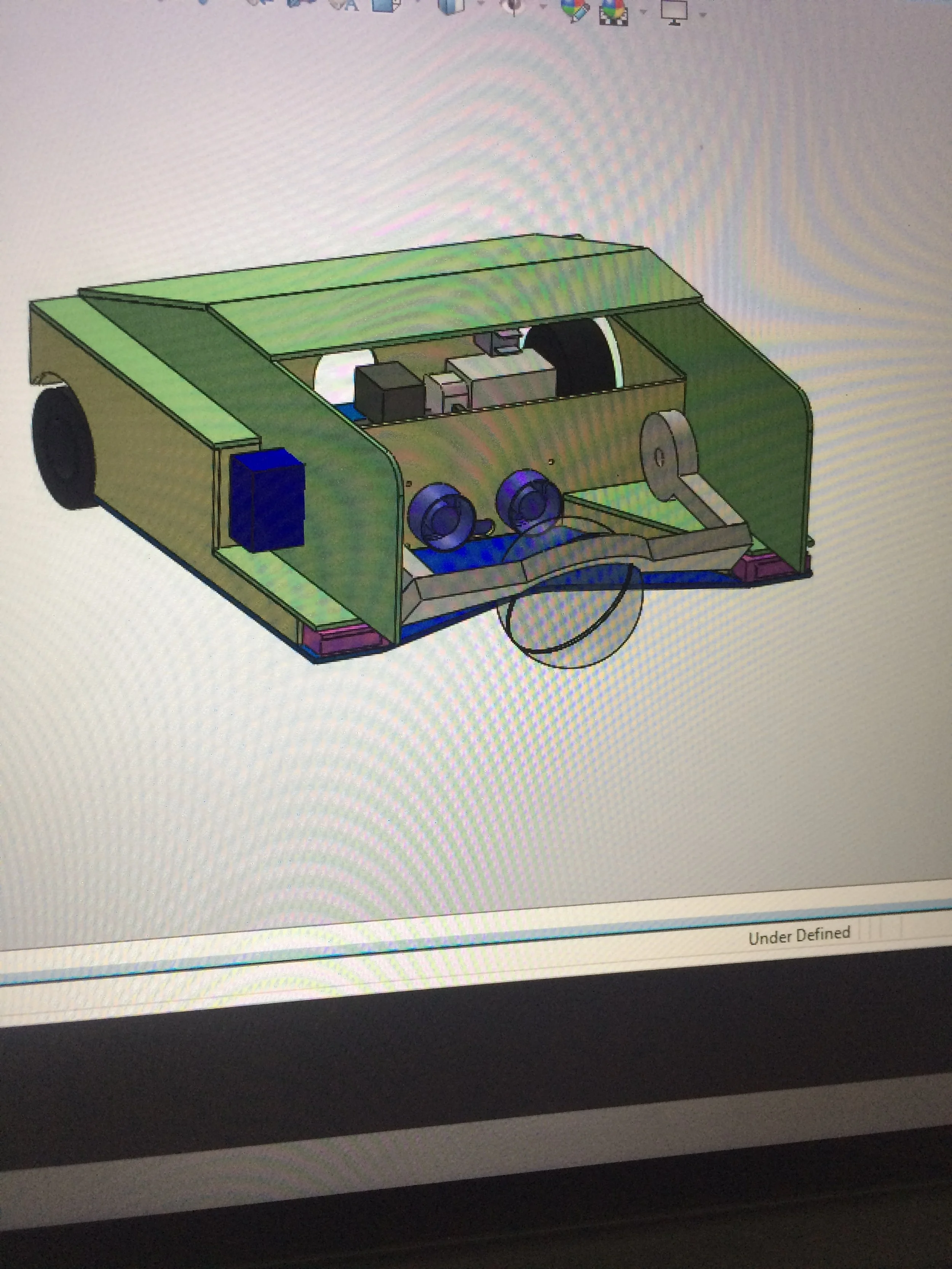
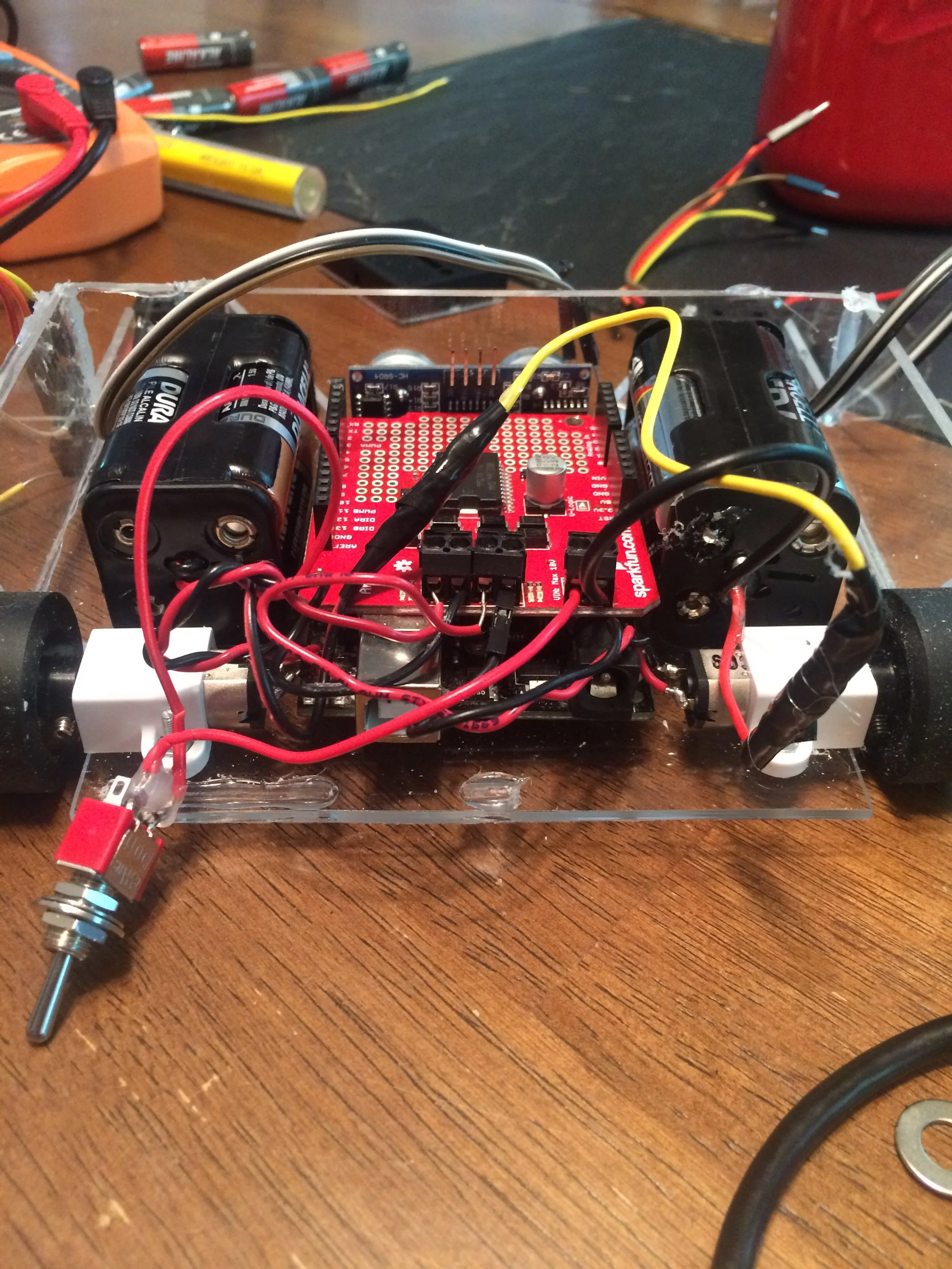
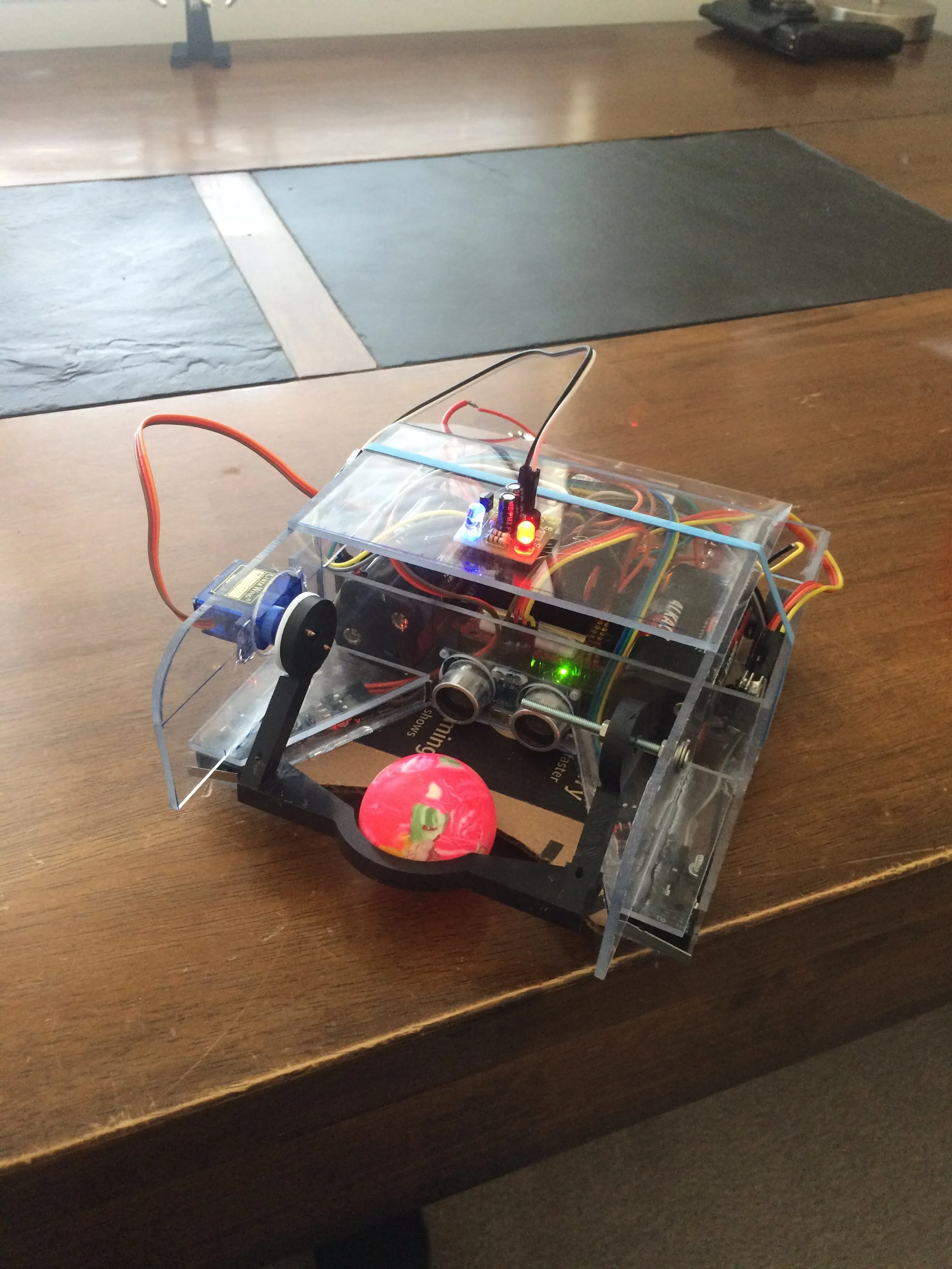
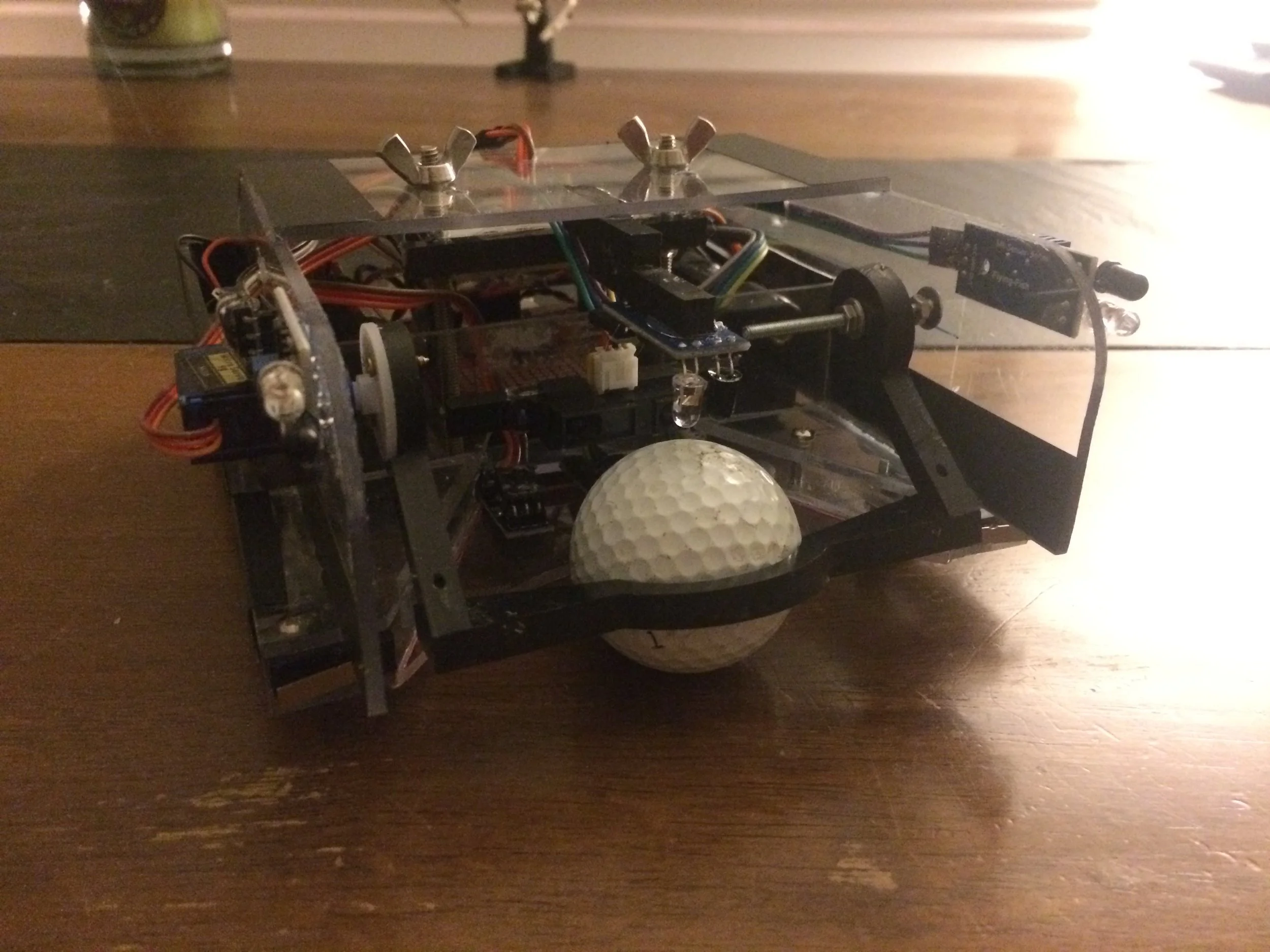
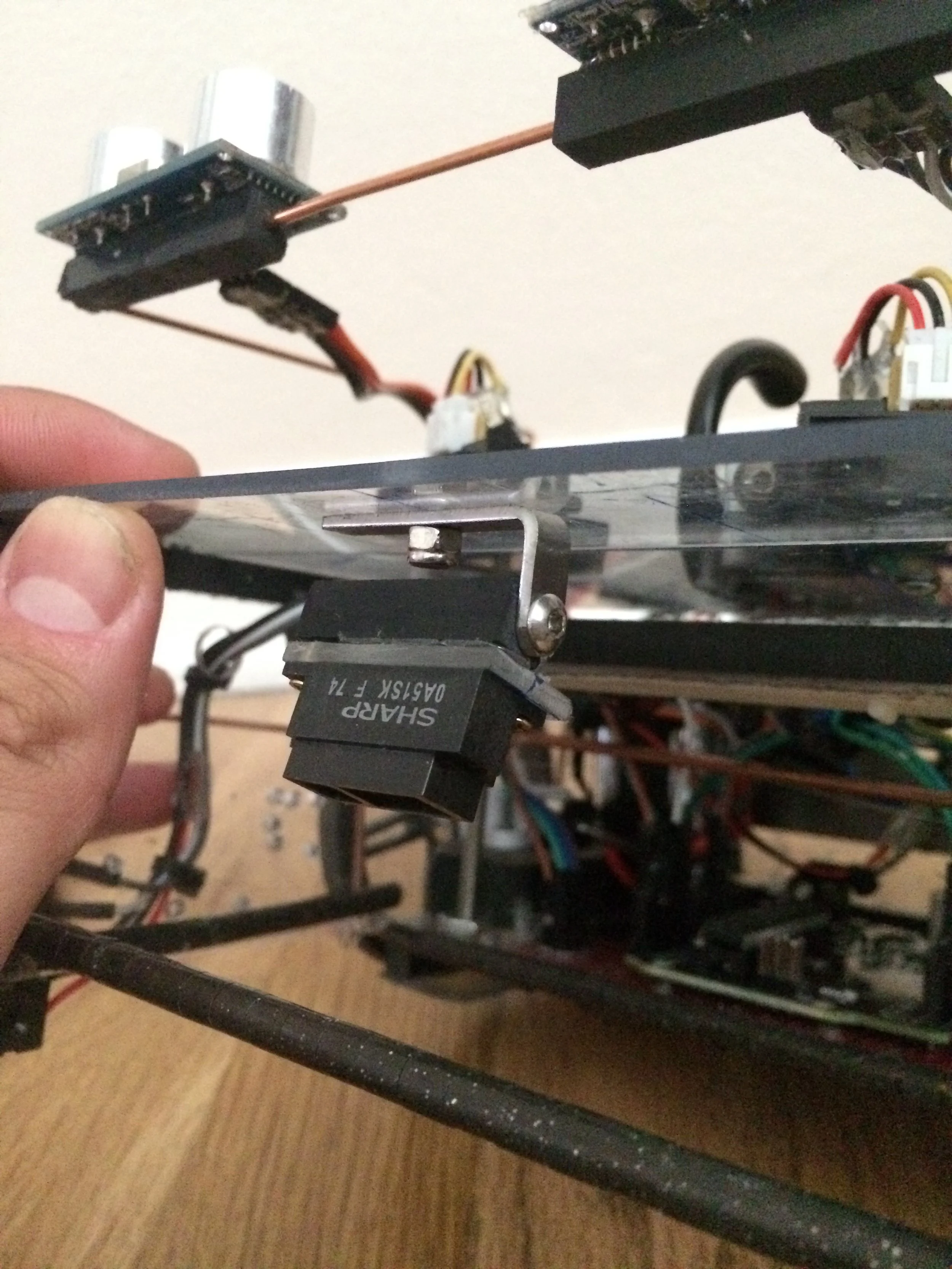
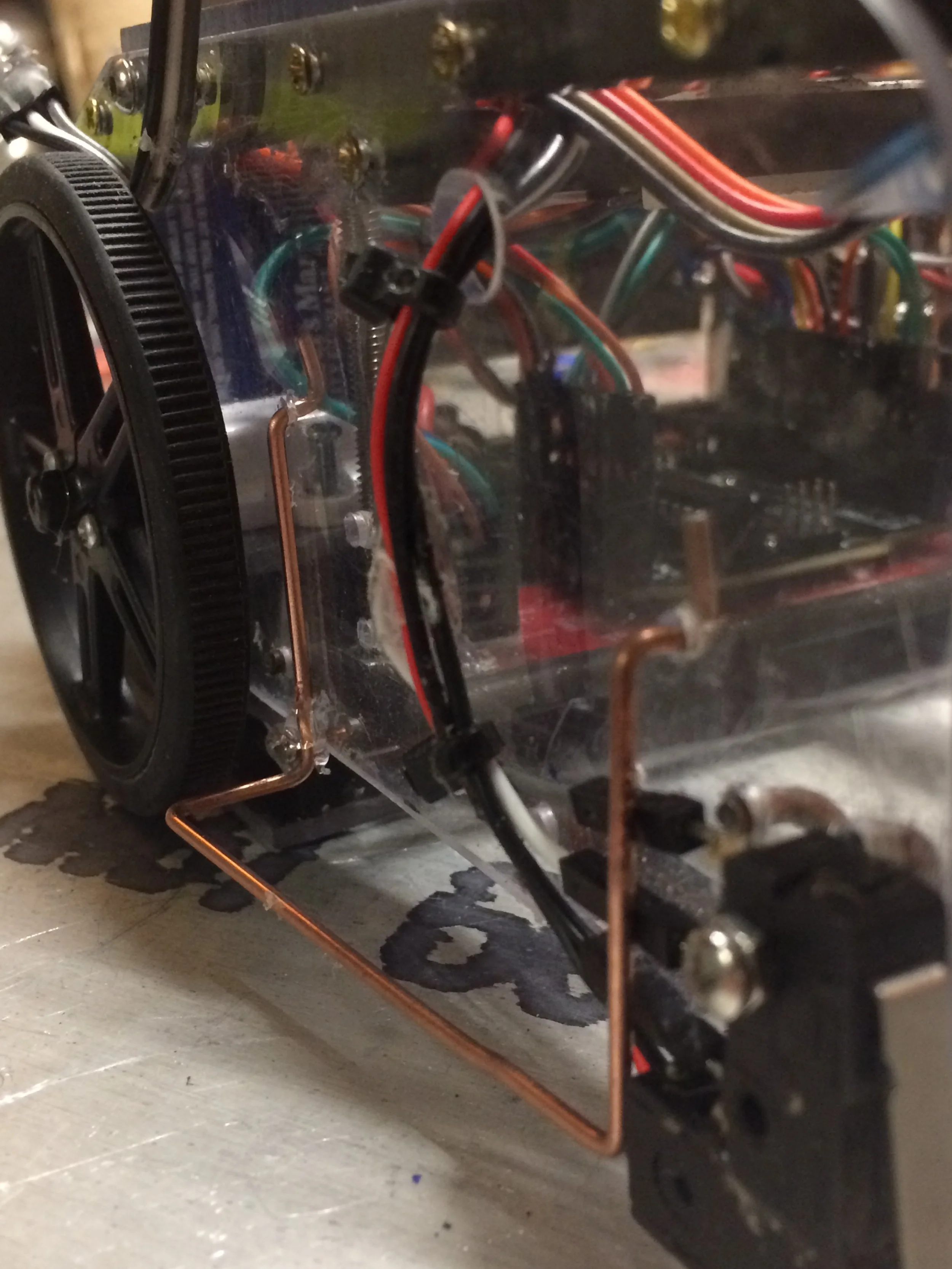
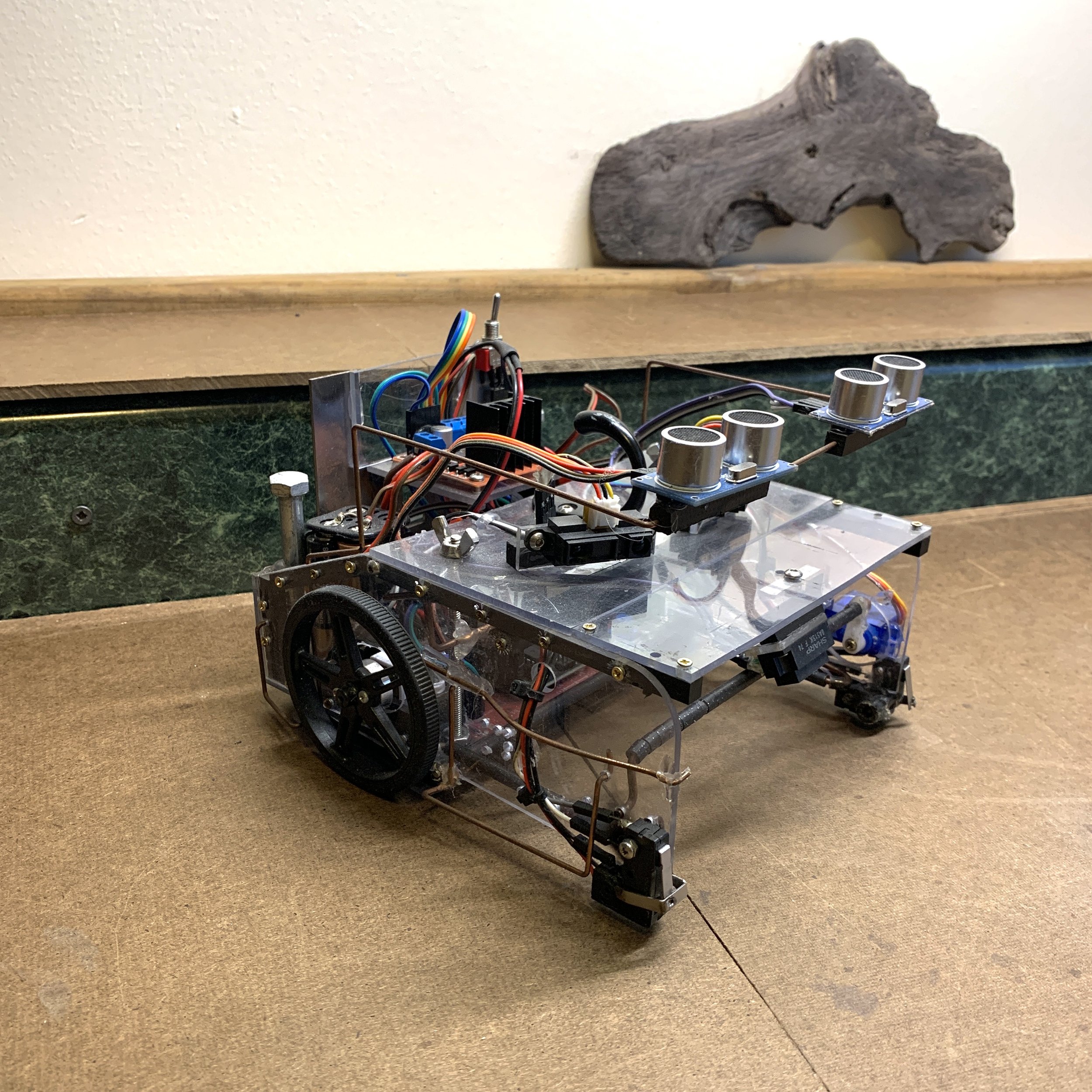
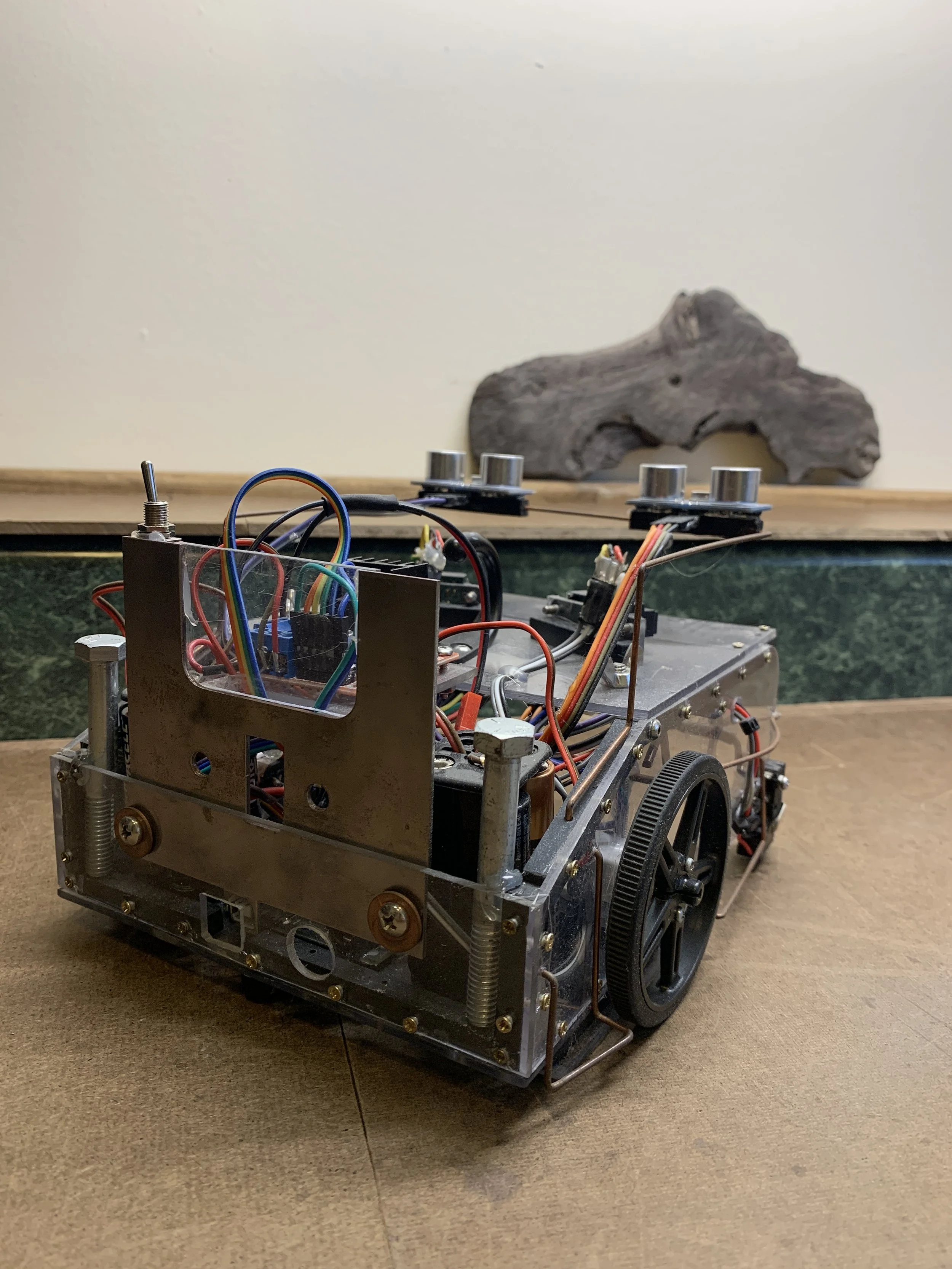
Mechanical Design
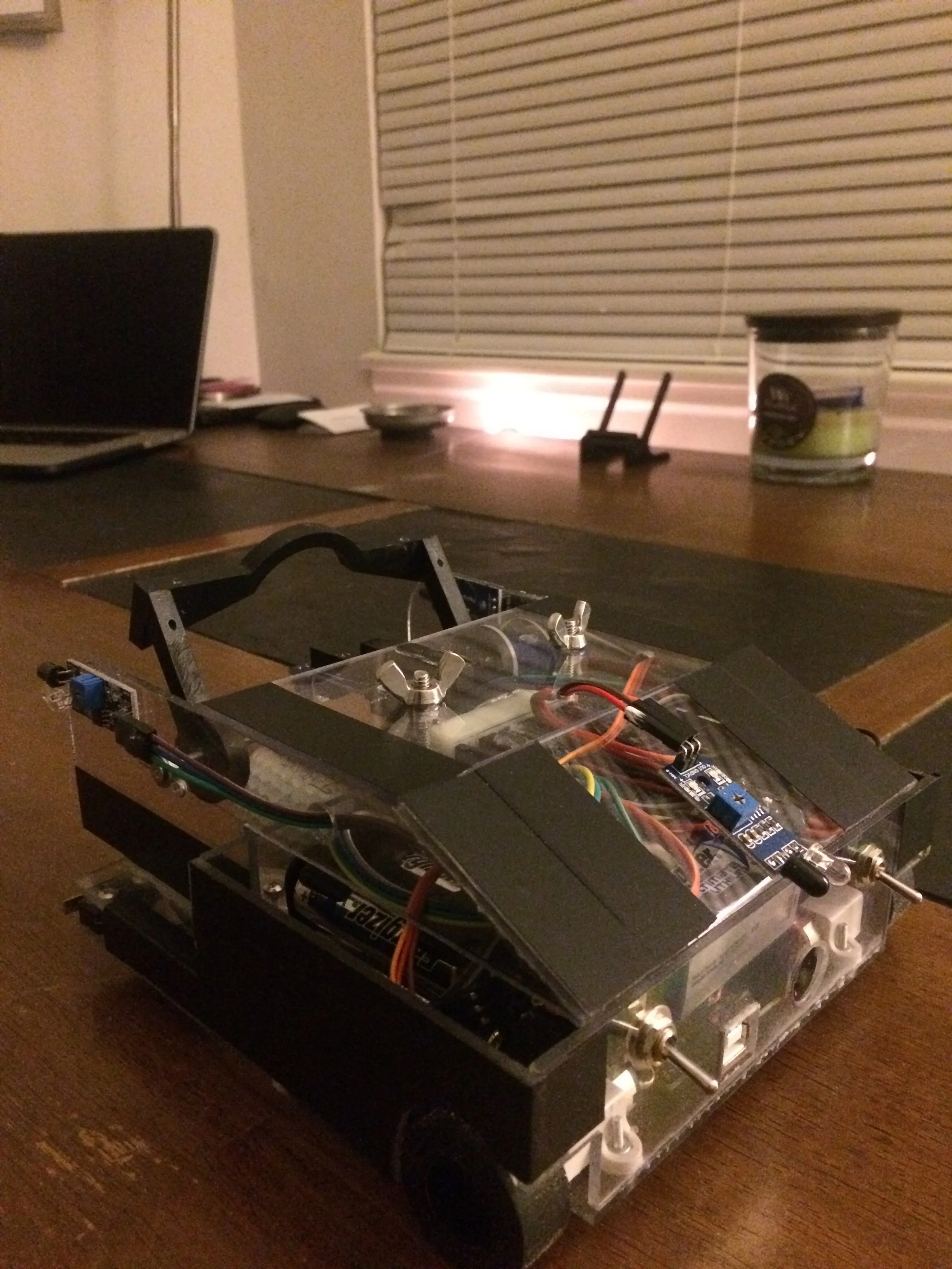
The robot chassis was constructed using polycarbonate panels reinforced with an ABS framework, providing a lightweight yet durable structure. This combination allowed for rapid fabrication while maintaining sufficient rigidity during collisions and operation.
A two-wheel drive configuration was used, with a rear-weighted design to improve stability and prevent forward tipping during ball collection. Weight distribution was adjusted to maintain balance while maximizing traction and control.
The top panel was secured using wing nuts, allowing for quick access to internal components for maintenance, wiring adjustments, and rapid iteration during testing.

Results
The robot achieved 1st place in the Robot-Sockey competition, completing 8 rounds without any mechanical, electrical, or software failures. The final design demonstrated reliable system integration and consistent performance under competition conditions.


External Recognition
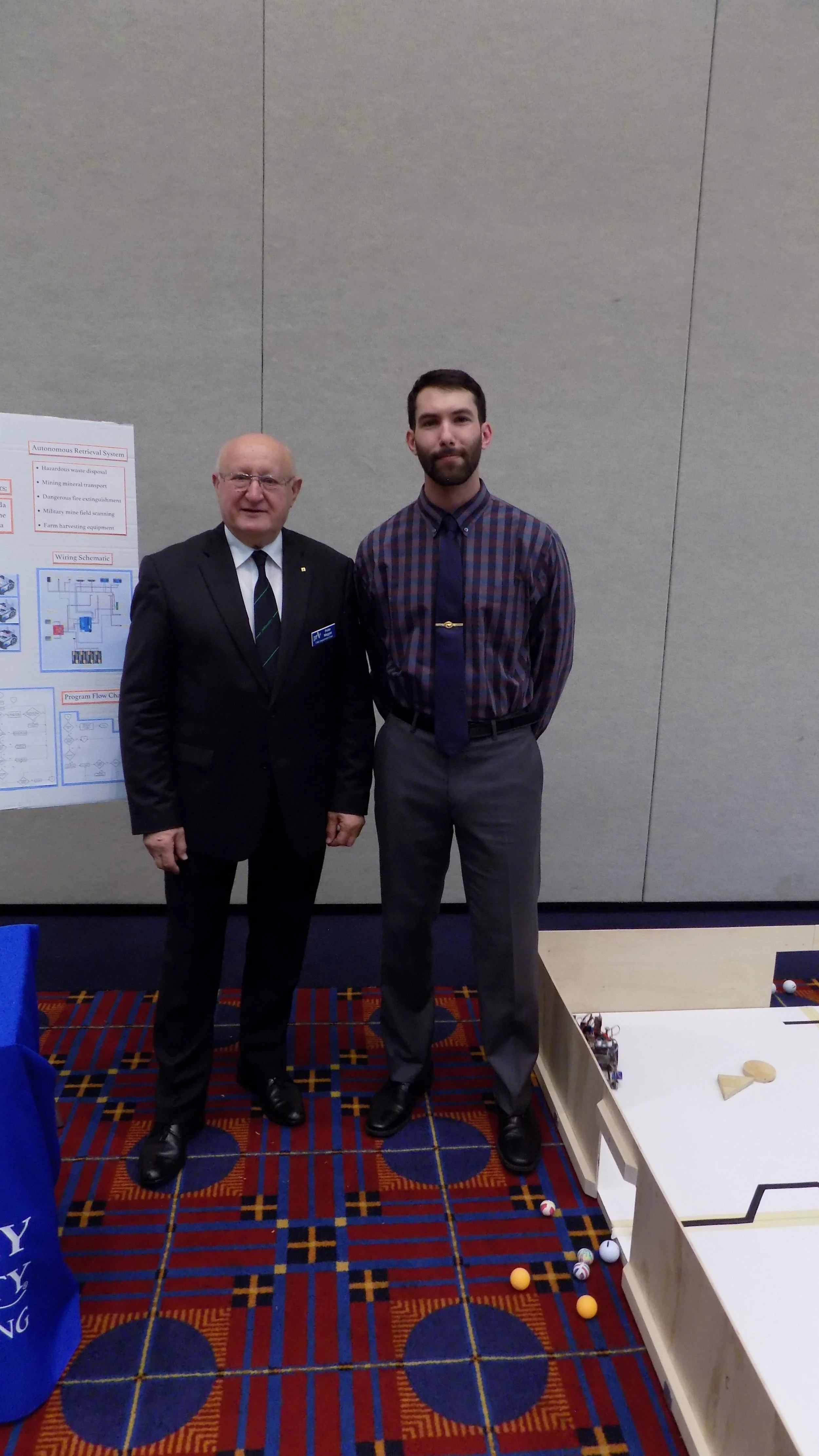
This project was selected among a small group of finalist in the IEEE International Student Robotics Competition.
I presented the project in Portland, OR, representing Grand Valley State University against international teams. The project was awarded 1st Place based on its design, implementation, and overall system performance.





Videos
Watch on YouTube
Competition (Round 2)

Robot 2 Testing
Robot 1 Ball Catch Demo
Robot 1 Line Follow Demo
Robot 1 Object Avoidance Demo